基于路径积分强化学习方法的蛇形机器人目标导向运动
 , 朱威, 郭宪
, 朱威, 郭宪 Target-Directed Locomotion of a Snake-Like Robot Based on Path Integral Reinforcement Learning
FANG Yongchun1 , ZHU Wei1 , GUO Xian1
, ZHU Wei, GUO Xian 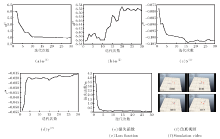
基于路径积分强化学习方法的蛇形机器人目标导向运动 |
|
方勇纯, 朱威, 郭宪 |
Target-Directed Locomotion of a Snake-Like Robot Based on Path Integral Reinforcement Learning |
|
FANG Yongchun
, ZHU Wei, GUO Xian |
| 有障碍仿真结果 |
| |