


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于卷积神经网络的仿鼠脑海马结构认知地图构建方法
[于乃功1, 2  , 魏雅乾
, 魏雅乾1, 2, 3 , 王林1, 2 ]
, 魏雅乾, 王林]
|
|



于乃功,博士,教授,主要研究方向为计算智能、智能系统、机器人学与机器人技术、机器视觉.E-mail:yunaigong@bjut.edu.cn.
作者简介:

魏雅乾,硕士研究生,主要研究方向为模式识别、智能系统、仿生机器人导航.E-mail:17810299896@163.com.

王 林,硕士研究生,主要研究方向为模式识别、智能系统、仿生机器人导航.E-mail:1399671550@qq.com.
针对融合视觉信息的仿鼠脑海马模型闭环检测精度较低、地图构建不准确的问题,文中提出基于卷积神经网络的仿鼠脑海马结构认知地图构建方法.利用改进的卷积神经网络模型提取视觉输入特征,融合空间细胞计算模型得到位置信息,并构建认知地图.基于汉明距离计算视觉信息与视图库中图像的相似度,实现对复杂动态环境中熟悉场景的识别,完成机器人在环境中的定位及位置纠正.仿真与物理实验验证文中方法的有效性与鲁棒性.
YU Naigong, Ph.D., professor. His research interests include computational intelligence, intelligent system, robotics and robot technology, machine vision.
AboutAuthor:
WEI Yaqian, master student. Her research interests include pattern recognition, intelligent system and bionic robot navigation.
WANG Lin, master student. His research interests include pattern recognition, intelligent system and bionic robot navigation.
Rat hippocampal formation model fusing visual information has problems of low pose estimation accuracy of closed loop detection and inaccurate map construction. Aiming at the problems, a cognitive map building method based on rat hippocampal formation using convolutional neural network(CNN) is proposed. The improved CNN is utilized to extract visual input features. Location information is obtained by integrating spatial cell computing model and the information is fused to construct cognitive map. Hamming distance is adopted to calculate the similarity between visual information and images in visual library, and thus the familiar scene in the complex dynamic environment is recognized, and the self-positioning and position correction of the robot are completed. Simulation and physical experiments indicate that the proposed method is effective and robust.
本文责任编委 高隽
Recommended by Associate Editor GAO Jun
自主定位与导航是智能移动机器人领域的研究热点.一直以来, 同步定位与地图构建(Simultaneous Localization and Mapping, SLAM)是实现机器人在未知环境中自主定位与导航的主要方式[1], 但SLAM存在计算量较大、复杂度较高等问题, 相比生物自身的导航能力, SLAM智能化水平相对较低.生物体可以轻易了解自己在环境中的位置, 这离不开大脑的“ GPS” 系统[2].Tolman[3]通过三通路迷宫实验提出“ 认知地图” 的概念, 证实生物会对外部环境形成内部表征, 生成具有相对几何关系特征的外部环境描述.
随着大鼠等哺乳动物大脑海马区中与认知导航相关的功能性细胞的发现, 为更好地实现机器人导航提供新的思路.在哺乳动物的大脑海马区中, 参与“ GPS” 定位的功能细胞包括头朝向细胞[4]、网格细胞[5]及位置细胞[6]等.研究人员根据这些细胞的生理学放电反应开发多种计算模型.Burak等[7]根据网格细胞的六边形放电模式, 构建网格细胞的连续吸引子网络模型, 通过对速度和方向进行路径积分, 推算大鼠在环境中的位置.Hu等[8]通过Hebb竞争型神经网络建立网格细胞到位置细胞的映射关系, 解决仅由网格细胞活动模式表示环境位置的模糊性问题.
研究发现, 鼠脑的导航系统不仅依赖于导航细胞的路径整合功能, 还涉及外界环境的视觉线索[9].为了将视觉线索引入海马体计算模型, Rebai等[10]借鉴灵长类动物大脑的一些特性, 通过提取视觉信息并采用模糊自适应共振理论(Adaptive Resonance Theory, ART)架构建立视觉记忆, 实现机器人对环境的认知表示.Milford等[11]提出基于鼠类定位与构图的导航算法(Rat SLAM, RatSLAM), 利用连续吸引子网络模型模拟大鼠感知环境的机制, 并通过图像扫描线强度分布 (Scanline Intensity Profile)匹配算法实现闭环检测.Zhou等[12]在RatSLAM基础上采用定向二进制简单描述符(Oriented Brief, ORB)特征提取算法提取图像特征, 用于识别熟悉的视觉场景序列, 完成闭环检测及位置纠正.Yu等[13]在海马体计算模型基础上, 基于加速稳健特征(Speeded Up Robust Feature, SURF)提取完成图像匹配, 进行闭环检测及位置纠正.但是, 上述方法中使用的图像扫描线强度分布算法、ORB特征提取和SURF图像匹配技术受环境因素影响较大, 在场景重复性较强的室内环境中容易出现误匹配.
随着计算机视觉的发展, 卷积神经网络(Con-volutional Neural Network, CNN)凭借出色的深度语义信息提取能力, 逐渐取代手工特征提取方法, 在图像分类[14]、目标检测[15]等领域得到广泛应用.本文提出基于CNN的仿鼠脑海马结构认知地图构建方法, 结合CNN与海马体细胞计算模型构建认知地图, 实现机器人认知、学习及定位功能.首先通过构建海马体空间细胞计算模型, 完成位置细胞集群的空间环境表达, 获得机器人的位置信息.然后基于微调的VGG-16网络提取视觉信息特征并处理, 获得机器人所处位置的环境信息.最后关联环境信息和位置信息, 构建环境认知地图.
海马体是大脑学习、形成场景记忆及执行空间导航的关键中枢, 存在多种与空间定位和导航相关的细胞, 包括网格细胞及位置细胞等.网格细胞的作用类似于一个坐标系, 在动物探索环境的过程中会发生周期性放电活动, 放电野会覆盖整个环境, 并呈现一种稳定的二维空间编码形式, 称为脑内的路径积分器[16].位置细胞可以在环境中特定位置发生规律性放电, 建立与外界空间位置的一一对应关系.海马体通过这些导航细胞之间的相互映射关系及特异性放电响应, 完成对外部环境位置的表达.
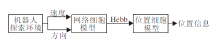
根据网格细胞和位置细胞之间的相互作用机理, 构建位置感知模型.位置感知模型整体结构如图1所示, 机器人探索环境, 采集速度和方向信息, 输入到网格细胞计算模型, 生成网格细胞群活动.然后利用网格细胞到位置细胞的Hebb竞争型神经网络模型[17], 选择网格细胞群活动子集, 生成位置细胞活动.最后根据位置细胞响应活动完成对外界环境位置信息的表达.
 | 图1 位置感知模型结构图Fig.1 Structure of location-aware model |
网格细胞模型根据二维连续吸引子网络(Continuous Attractor Network, CAN)进行建模, 生成速度驱动的网格细胞群活动.在吸引子网络中, 神经元排列在一个二维神经板(Neural Sheet)上.假设神经板的长、宽分别为Nx、Ny, 则神经板上神经元的数量为Nx× Ny.为了解决吸引子网络边界问题, 将神经板上下左右边界神经元相连, 形成二维环状吸引子模型.神经元通过局部兴奋性连接和全局抑制性连接, 在神经板上形成活动包(Bump).
当有速度信息输入时, 活动包随速度方向在神经板上移动, 生成网格细胞群活动.基于速率的网格细胞i的动力学等式为
T
f(x)=
其中:sj为网格细胞j的当前活动状态; T为神经元响应的时间常数;
为网格细胞i到j的连接权重, 权重矩阵呈现一种中间高、两边低的墨西哥帽形状的分布, g为调整网格细胞群活动大小的增益, 初始化时定义γ =1.05β , β =3/
位置细胞模型基于Hebb竞争型神经网络进行建模.位置细胞的活动来源于网格间距和相位不同的网格细胞群活动子集.对网格细胞间距λ grid和网格细胞活动增益g采样, 用于产生不同网格间距和相位的网格细胞, 其中每个神经板表示一个网格细胞群活动, 通过竞争学习生成位置细胞活动.位置细胞的活动表示为
pi=A(
其中:A为位置细胞增益常数; M为神经板的层数, 本文实验中设置M=60; r为环境中动物的位置;
利用Hebb学习规则, 建立竞争型神经网络模型, 寻找网格细胞群活动子集:
其中, k为学习率, pi为位置细胞放电率, < sj> 为网格细胞平均放电率.
如果网格细胞的放电率大于网格细胞的平均放电率, 会增强网格细胞到位置细胞的突触连接, 反之会减弱突触连接.因此, 对于特定的位置细胞, 特定的网格细胞群活动子集对其放电率影响最大.
上述构建的位置感知模型通过采集机器人的速度和方向信息, 输入到“ 网格细胞-位置细胞” 环路, 实现机器人在环境中的位置表达, 并建立与外界环境位置的一一对应关系.
鼠脑的导航系统不仅依赖于内部的路径整合功能, 还涉及外界环境的视觉线索.新皮质接收外部感官信息, 并通过内嗅皮层, 将信息传递给负责情景记忆的海马体(Hippocampus)结构[18], 通过融合外部视觉信息和位置细胞、网格细胞的神经活动以更新位姿, 进而指导动物在未知环境中导航.
本节模拟上述功能环路, 构建环境感知模型.机器人探索环境时, 提取采集的图像特征, 经二值化处理后存入视图库, 并关联同时发生特异性响应的位置细胞, 当再次检测到与视图库图像相似的场景图像时, 使用该图像关联的位置细胞信息纠正当前位置.模块主要由三部分组成:图像特征提取、二值化处理和相似性度量.
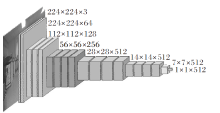
将VGG-16作为视觉输入图像的特征提取器.VGG-16主要由5个卷积层(Conv1、Conv2、Conv3、Conv4、Conv5), 5个最大池化层(Pool1、Pool2、Pool3、Pool4、Pool5)和3个全连接层(Fc6、Fc7、Fc8)[19]组成.由于网络模型的Fc7层提取的特征维度为1× 1× 4 096, 存在参数冗余且占用较大计算空间的问题, 因此本文借鉴网络中的网络(Network in Network, NIN)[20]中的全局平均池化(Global Average Pooling, GAP)思想, 去除VGG-16模型中的3个全连接层, 并使用1层全局平均池化层代替.此方法实现特征降维, 大幅降低网络参数, 并保留由前面各个卷积层和池化层提取的空间信息.微调后的网络模型如图2所示, 输出的特征维度为1× 1× 512.
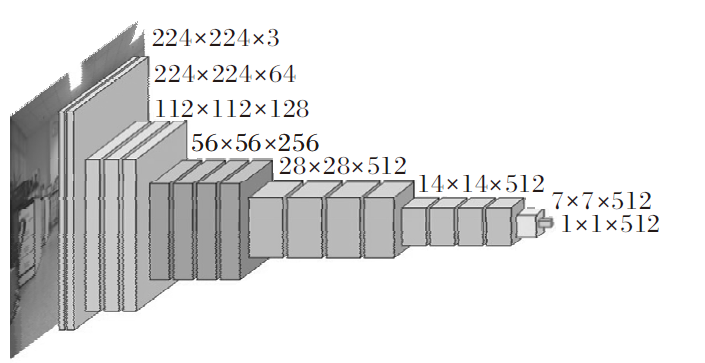 | 图2 微调后的VGG-16 网络结构图Fig.2 Structure of VGG-16 network after fine tuning |
将上述网络提取的特征向量v=(v1, v2, …, v512)中的元素映射到[0, 1]区间, 生成新向量:
vi'=
其中, vi为降维后特征向量的元素, vmin为特征向量中的最小值元素, vmax为特征向量中的最大值元素.对v'=(v'1, v'2, …, v'512)进行哈希编码, 构成二值化向量μ =(μ 1, μ 2, …, μ d),
μ i=
其中, i=0, 1, …, 512, v'i为向量v'的第i个元素, T为阈值, 在本文方法中T=0.5.
根据
Δ Pi=δ
将降维和二值化处理后的图像特征关联同时发生特异性响应的位置细胞, 其中, δ 为一个常数, 决定视觉线索对位置细胞活动的影响, β i为位置细胞与图像特征之间的连接矩阵, Vi为当前位置细胞对应的图像特征.
相似性度量是图像检索技术中一个重要步骤.机器人探索环境时, 当发现当前图像与视图库中图像的相似度超过设定阈值时, 利用相似图像关联的位置细胞活动纠正当前机器人的位置.本文采用汉明距离判断图像的相似度:
d(μ input, μ database)=
其中, μ input为经二值化处理后的输入图像特征向量, μ database为视图库中的图像特征向量.
认知地图被认为是一种对外界环境的内在表征[21], 本节依据海马结构空间细胞的放电活动构建认知地图.构建的认知图是一种半拓扑图, 根据位置细胞路径积分的放电位置和视觉关联, 选择合适的位置点作为拓扑点.
构建的认知地图由具有拓扑关系的认知地图网络节点e组成, 每个认知节点包含位置细胞的放电活动pi、环境图像特征Vi及认知节点之间的拓扑关系Li.认知节点ei={pi, Vi, Li}.当位置细胞的活动状态pi、环境图像特征Vi与认知节点中的相关信息不匹配时, 创建新的认知节点.使用评价参数S对比两者之间的匹配程度:
S=μ p|pi-p|+μ v|Vi-V|,
其中, μ p为位置细胞活动状态, μ v为环境图像特征的匹配权重.当S超过设定阈值时, 创建新的认知节点, 新节点
ej={pj, Vj, Li+Δ L},
其中Δ L为与上一个认知节点的间距.
当评价参数S未超过设定阈值时, 认为机器人回到之前经历的位置.为了保证地图构建的准确性, 本文方法认为, 在经历连续3帧相似度超过设定阈值时, 开始纠正位置.但由于之前多个位置均存在误差累积, 仍需对之前的多个认知节点进行位置纠正.本文采用图松弛算法[22]纠正对各位置点的累计误差, 纠正过程表示如下:
Δ Lij=α [
其中, α 为认知地图纠正常数, 取值为0.5, Nf为认知地图当前网络节点ei与其它节点的连接数量, Nt为其它认知单元网络节点与当前节点ei的连接数量.
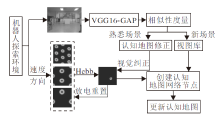
构建认知地图的过程如图3所示, 当机器人在未知环境中探索时, 采集机器人的速度和方向信息, 输入到位置感知模型, 激发位置细胞特异性放电.同时将捕获的环境特征添加到视图库, 与发生特异性放电的位置细胞建立一个映射关系.在探索过程中观察到与视图库中相似场景时, 会激发与之关联的位置细胞, 并进行位置更新.机器人在环境探索过程中共同存储环境信息和与之对应的位置信息, 形成认知地图, 完成对外界环境的描述.
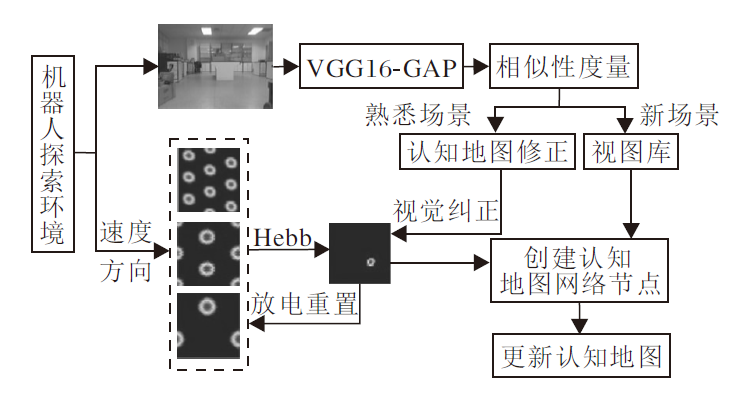 | 图3 认知地图构建流程图Fig.3 Flow chart of cognitive map building |
为了验证方法的有效性, 本文采用仿真实验和物理实验验证构建的模型.基于St.Lucia数据集进行仿真实验, 基于3-DX机器人平台及RGB相机, 在实验室环境下进行物理实验.
根据文献[23], 随着神经板尺度和层数增加, 存储容量会增加, 计算效率将降低.为了在保证计算精度的同时提高计算效率, 设置60层神经板, 用于构建网格细胞模型, 其中每层神经板的大小为48× 48, 神经元响应的时间常数设置为10 ms.在每层神经板中, 网格细胞的间距在[9, 20]内, 进行间隔为1的均匀采样.图4为实验开始30 s时, 网格细胞间距分别为 12、16、20的网格细胞群活动图.
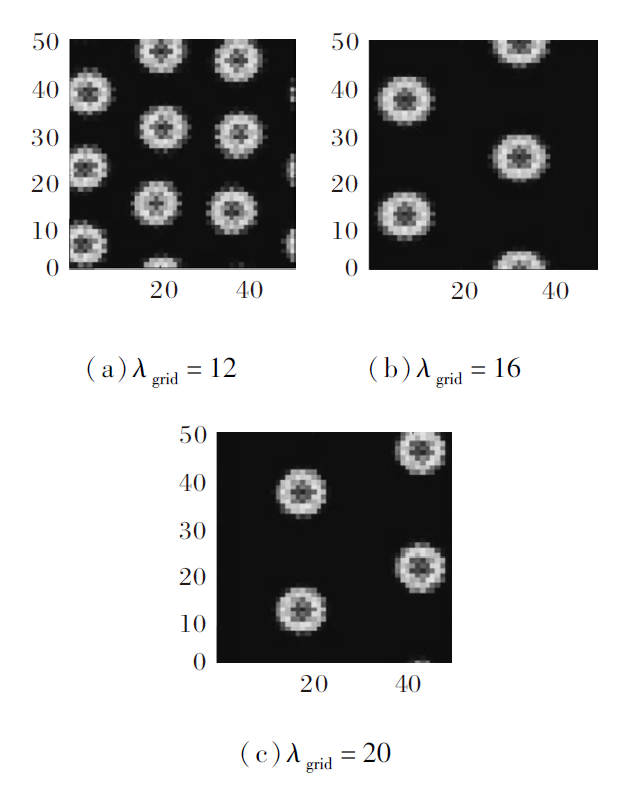 | 图4 不同细胞间距的网格细胞群活动图Fig.4 Population activity of grid cells with different grid spacing |
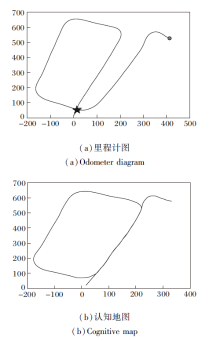
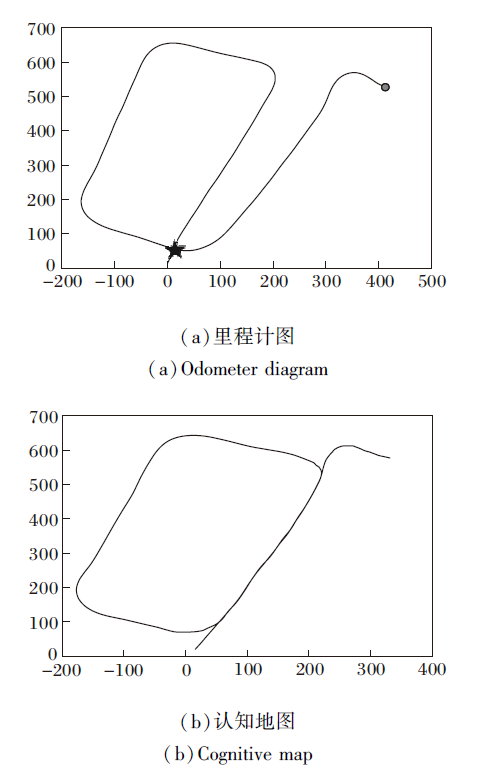
基于公开数据集St.Lucia进行仿真实验.数据集由行驶在昆士兰大学圣卢西亚校区周围赛道上的汽车采集, 包含2 517帧图像, 当汽车采集1 735帧图像后进入已行驶路段.
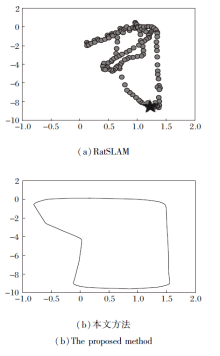
图5为仿真结果.(a)中汽车行驶一圈后经过星号标志, 开始进入已行驶路段, 但由于原始里程计信息的累计误差, 星号标志后的轨迹并未与原轨迹重合, 出现漂移现象.对比(b)发现, 采用本文方法可以对速度和方向进行路径整合, 以位置细胞的特异性响应表示位置, 并可以根据视觉线索精确检测已行驶路段, 消除累计误差, 修正路径, 成功绘制环境的拓扑结构图.
 | 图5 仿真实验结果Fig.5 Results of simulation experiment |
在具有动态信息的实验室环境中进行物理实验, 采用3-DX机器人平台, 配备RGB相机, 在15 m× 3 m的范围内探索, 机器人在探索环境时共采集452幅实验室环境图像, 其中前192幅为第1次遍历实验室环境采集的图像, 后260幅为第2次遍历采集的图像.机器人在遍历环境过程中, 基于视觉输入和海马体空间细胞模型构建认知地图.
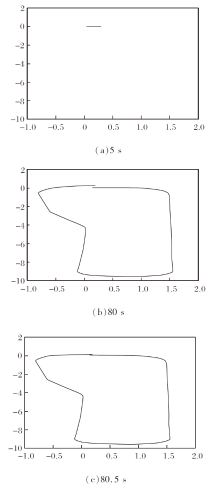
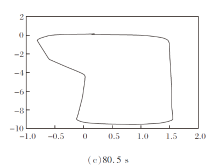
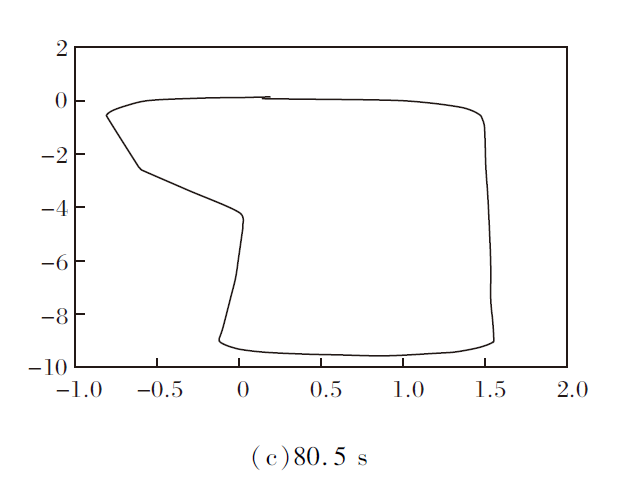
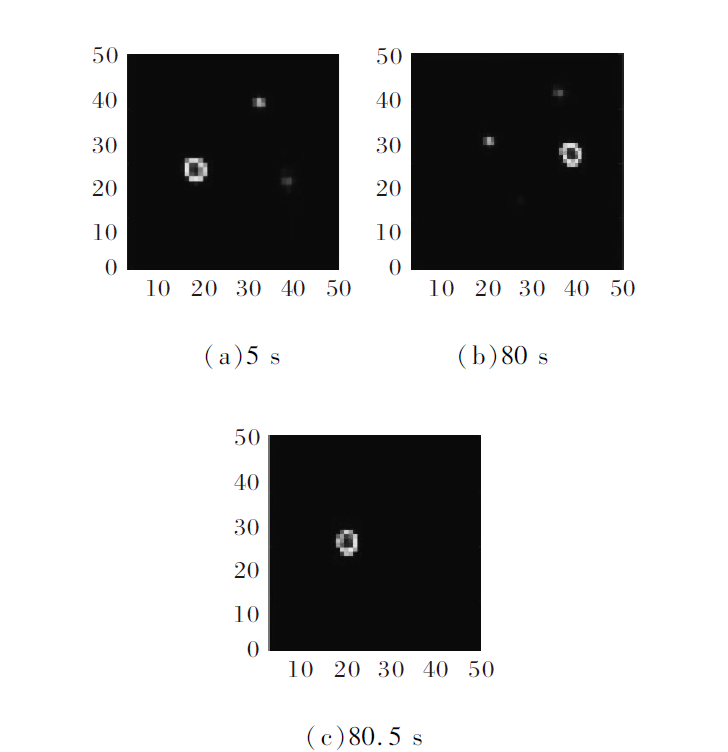
根据4.1节设置的实验参数, 在机器人探索实验室环境时, 应用本文方法构建认知地图.为了验证认知地图构建过程中的位置纠正功能, 获取如图6~图8所示3个不同时刻机器人采集的环境图像、机器人运动轨迹和位置细胞放电图.在80 s时, 机器人采集的图像(图6(b))与图6(a)中采集到的图像匹配, 检测到闭环, 并开始进行位置纠正.从图7(c)可发现, 机器人在80.5 s时完成位置纠正, 并对位置细胞放电重置.
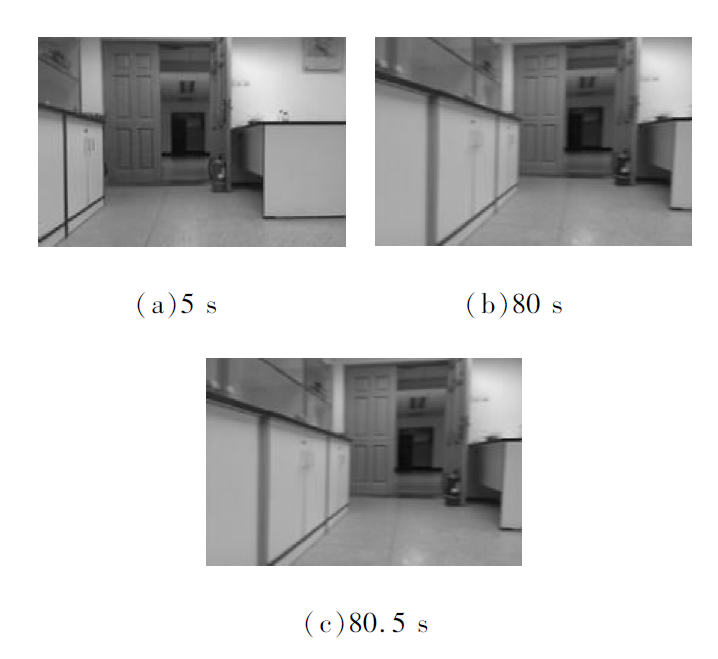 | 图6 不同时刻机器人采集的环境图像Fig.6 Environment images captured by the robot at different time |
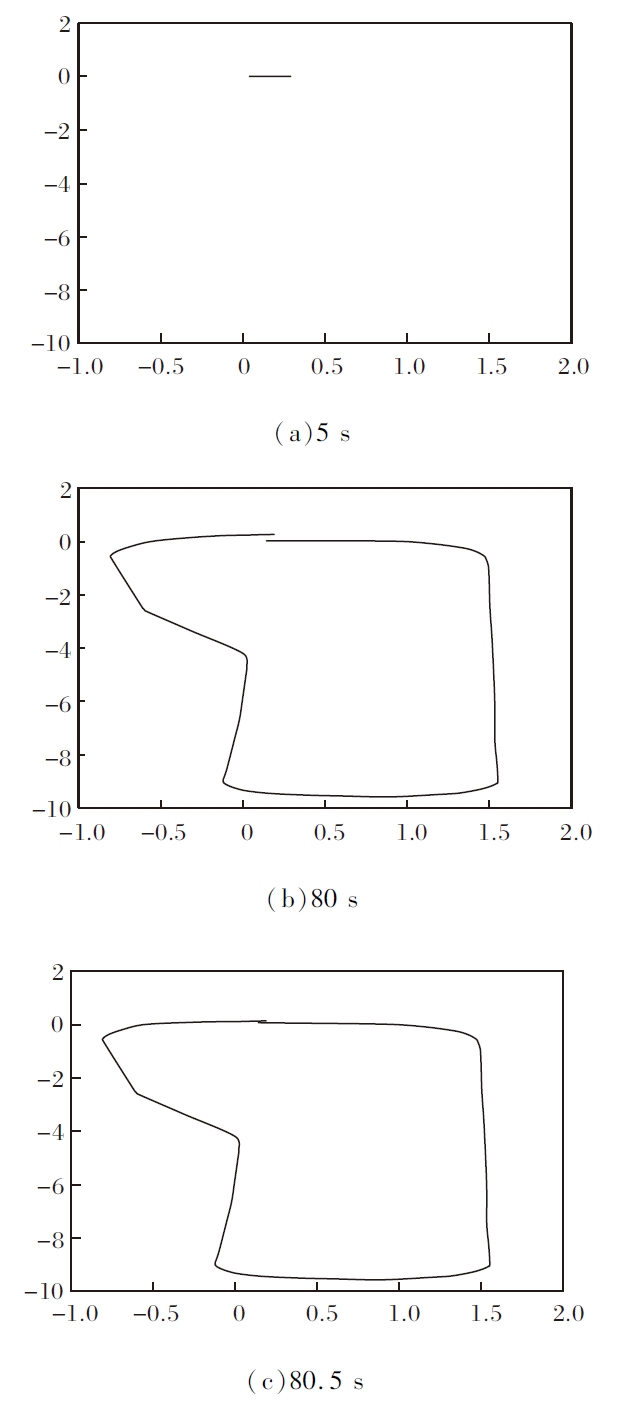 | 图7 不同时刻机器人的认知地图Fig.7 Cognitive map of robot at different time |
 | 图8 不同时刻位置细胞放电图Fig.8 Discharge of place cells at different time |
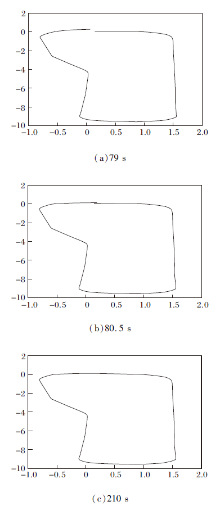
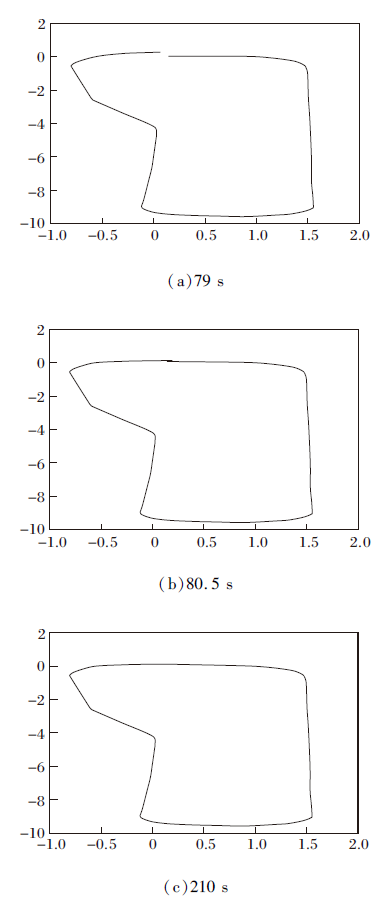
图9为不同时刻机器人在实验室环境中构建的认知地图, (a)中机器人探索实验室一圈并回到初始位置.(b)中机器人检测到与初始位置相似的图像, 进行位置纠正.(c)中机器人在实验室环境探索两圈并构建认知地图.
 | 图9 不同时刻机器人在实验室环境的认知地图Fig.9 Cognitive map of the robot in laboratory at different time |
图10为不同时刻机器人的原始里程计图.随时间推移, 在机器人导航过程中, 里程累计误差会逐渐增加, 造成严重的轨迹漂移.
 | 图10 原始里程计地图Fig.10 Raw odometer map |
对比图10中原始里程计图发现, 本文方法可以检测机器人之前遍历过的位置, 纠正错误的定位, 绘制精确的环境认知地图, 解决由于里程累计误差造成的轨迹漂移问题.
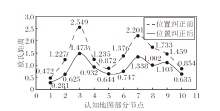
以机器人初始位置为坐标原点, 在认知地图上均匀选取10个位置点坐标, 对比认知地图位置纠正前后, 机器人实际位置坐标与本文方法得到的机器人位置坐标的欧氏距离, 如图11所示.由图中可看出, 纠正前认知地图与机器人实际位置存在偏差较大, 位置纠正后, 认知地图的构建精度获得提高, 虽然也有一定偏差, 但基本稳定.
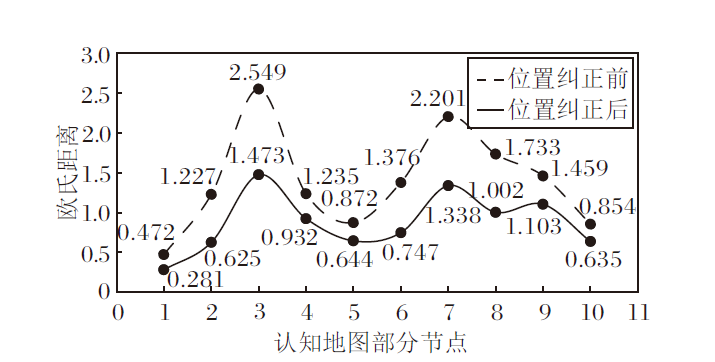 | 图11 认知地图与实际坐标偏差Fig.11 Deviation of cognitive map from actual coordinates |
本文在与4.3节相同的室内环境中, 对比RatSLAM和本文方法构建的认知地图效果, 如图12所示.由图可见, 在星号标志之前, RatSLAM和本文方法均可准确绘制机器人认知地图, 但经过星号标志处, RatSLAM检测到与之前遍历过的位置处相似的环境图像, 并进行位置纠正.但该处出现误匹配, 因此进行错误的位置纠正, 导致RatSLAM构建的认知地图轨迹杂乱, 不能进一步用于指导机器人导航.而本文方法可精确匹配视图库中的相似图像, 准确纠正错误位置, 构建准确的认知地图.
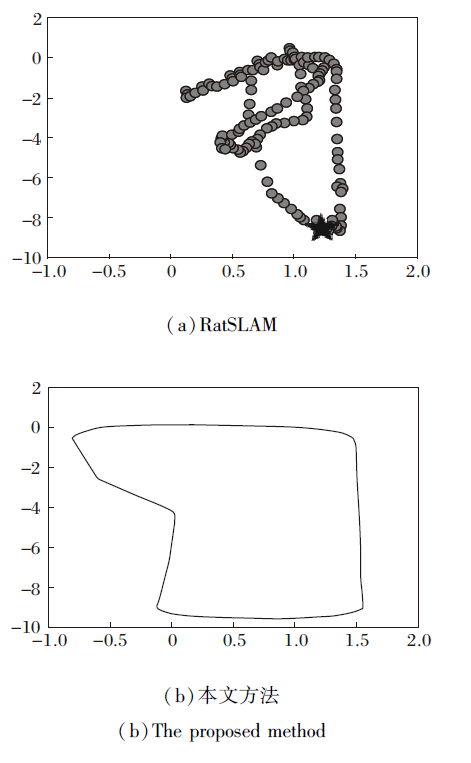 | 图12 两种方法构建的认知地图Fig.12 Cognitive map built by two methods |
针对海马体计算模型闭环检测过程中存在的图像误匹配问题, 本文提出基于卷积神经网络的仿鼠脑海马结构认知地图构建方法.分别利用位置感知模型和环境感知模型获取机器人的位置信息和环境信息, 融合两者以构建认知地图.通过汉明距离匹配熟悉场景, 完成闭环检测纠正位置.仿真实验和物理实验表明, 本文方法能使机器人在探索环境时准确检测熟悉场景, 纠正位置, 绘制精确的环境认知地图.对比RatSLAM发现, 本文方法在闭环检测及地图构建方面准确性较高, 提高机器人在重复性较强及动态环境中的导航精度, 有助于进一步的仿生导航研究.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|