
{kind=link}
不协调广义多尺度决策系统的局部最优尺度组合选择
[吴伟志1, 2  , 孙钰
, 孙钰1, 2 , 王霞1, 2 , 郑嘉文1, 2 ]
, 孙钰, 王霞, 郑嘉文]
|
|



作者简介:

孙 钰,硕士研究生,主要研究方向为粗糙集、粒计算.E-mail:1758668469@qq.com.

王 霞,博士,副教授,主要研究方向为概念格、粗糙集、粒计算.E-mail:bblylm@126.com.

郑嘉文,硕士研究生,主要研究方向为粗糙集、粒计算.E-mail:645958552@qq.com.
About Author:
SUN Yu, master student. Her research interests include rough set and granular computing.
WANG Xia, Ph.D., associate professor. Her research interests include concept lattice, rough set and granular computing.
ZHENG Jiawen, master student. Her research interests include rough set and granular computing.
针对不协调广义多尺度决策系统中每个对象事例的知识获取问题,文中提出局部最优尺度组合概念.首先,介绍广义多尺度决策系统中的尺度组合概念,给出在不同尺度组合下信息粒的表示及其相互关系.然后,在广义多尺度决策系统中,介绍不同尺度组合下集合的下近似与上近似概念及性质.最后,在不协调广义多尺度决策系统中定义7种局部最优尺度组合的概念,给出它们之间的相互关系,证明实际上只有5种不同的局部最优尺度组合概念.
To investigate knowledge acquisition for objects in inconsistent generalized multi-scale decision systems, the concept of local optimal scale combination is presented. Firstly, the notion of scale combination in a generalized multi-scale information system is introduced. Information granules with different scale combinations as well as their relationships from generalized multi-scale information systems are formulated. Lower and upper approximations of sets with different scale combinations in generalized multi-scale information systems are further constructed and their properties are examined. Finally, concepts of seven types of local optimal scale combinations for an object in an inconsistent generalized multi-scale decision system are defined and their relationships are clarified. It is proved that there are five different types of local optimal scale combinations in fact.
本文责任编委 苗夺谦
Recommended by Associate Editor MIAO Duoqian
粒计算(Granular Computing, GrC)[1]以粒(Granule)为基本计算单位, 以建立有效的大规模复杂数据集计算模型为目标, 是知识表示和知识发现的概念和计算范式.其中, 粒是具有不可分辨关系、相似关系或函数关系的对象集合[2].粒计算的研究方向主要包括粒的构造、表示、解释、最优尺度或粒度的选择及存在于粒之间的IF-THEN规则提取.
迄今为止, 学者们已提出很多涉及具体应用背景的粒计算模型和方法, 而粗糙集是推动粒计算研究的重要方向之一[3].虽然从各类决策系统中进行知识约简和规则提取的粗糙集方法已取得一系列成果[4, 5, 6, 7, 8, 9, 10, 11, 12, 13], 但原始的Pawlak粗糙集模型及其应用的信息系统和决策系统的一个基本假设是每个对象在每个属性下只能取唯一的属性值, 即它们都是单尺度信息系统.然而, 在现实生活中, 人们可能要在不同尺度下关于同一对象在同一属性或变量下对系统数据进行观察、表示、分析和做出决策[14], 因此如何在这样的数据集中表示粒和发现知识成为重要问题.
针对这种情形, Wu等[15]提出粗糙集数据分析模型, 即多尺度信息系统, 后称为Wu-Leung模型[16, 17].在此模型下, 研究多尺度信息系统中的粒表示, 并提出不同尺度下规则提取的方法.选择合适的尺度构造决策子系统用于分类或做出决策是多尺度决策系统知识获取的一个关键问题, 为此, Wu等[18, 19]给出几种不同意义下的最优尺度选择的定义, 并在多尺度决策系统中研究它们之间的关系.Gu等[20]和She等[21]讨论多尺度决策系统局部规则提取的算法.Wu等[22]把Wu-Leung模型推广到不完备的多尺度信息系统, 在不完备多尺度信息系统中定义信息粒的表示, 讨论各种意义下最优尺度概念之间的关系, 给出基于粗糙集的决策规则提取方法.Xie等[23]把Wu-Leung模型推广到形式决策背景上.Hao等[24]采用Wu-Leung模型, 研究对象不断增加的动态多尺度决策系统中的最优尺度选择问题.
针对不同尺度或粒层的知识获取问题, Luo等[25]对于多层次多准则决策系统, 提出增量粗糙集方法, 主要是为了在基于优势关系的粗糙近似算子意义下更新知识.Luo等[26]对于不完备多尺度决策系统, 提出增量式三支决策方法.值得注意的是, 在Wu-Leung模型中, 对多尺度信息系统的一个基本假设是所有属性都具有相同的尺度个数, 然而, 实际问题中不同的属性可能具有不同的尺度个数.针对这种情形, Li等[16]提出广义多尺度信息系统, 并提供2种最优尺度选择方法.Li等[17]定义6种最优尺度组合, 并在不协调的多尺度决策系统中设计一些算法, 计算这些最优尺度组合.Xu等[27]采用Dempster-Shafer证据理论刻画协调的广义多尺度决策系统最优尺度组合的数值特征.
多尺度决策系统在规则提取前需要解决2个关键问题:1)最优尺度的选择, 即从给定的系统中在保持某种性质不变的意义下选择一个合适的决策子系统用于总体分析和决策; 2)属性约简, 即在保持相同约束条件下找到最小的属性子集.属性约简又分有2类:1)对所有对象的约简, 作用是把所有对象使用最少的属性区分; 2)局部约简, 只是对各个对象的约简, 只需要把单个对象与其它对象分开.相比系统约简, 基于局部约简提取的规则更适合对象.类似地, 也可以对每个对象进行最优尺度组合的选择, 保持对象规则提取时某种性质不变的最粗尺度组合, 称为局部最优尺度组合.
目前, 学者们提出适合系统的不同意义下最优尺度组合概念, Wu等[28]针对广义多尺度决策系统, 总结并定义7种关于系统的最优尺度组合, 对比研究它们的关系.本文在文献[28]的基础上, 进一步定义不协调广义多尺度决策系统的7种局部最优尺度组合的概念, 并给出它们之间的关系.
一个信息系统为一个二元组(U, A), 其中, U={x1, x2, …, xn}, 为一个非空有限对象集, 称为论域, A={a1, a2, …, am}, 为一个非空有限属性集, 对于∀ a∈ A, 满足a∶ U→ Va, 即a(x)∈ Va, x∈ U, 其中Va={a(x)|x∈ U}称为a的值域.
对于非空子集B⊆A, 记
RB={(x, y)∈ U× U|a(x)=a(y), ∀ a∈ B}.
RB称为由属性集B诱导的不可分辨关系, 它把论域U粒化成关于属性集B的两两不交的等价类, 即
U/RB={[x]B|x∈ U},
其中
[x]B={y∈ U| (x, y)∈ RB}.
对于X⊆U, B⊆A, X关于属性集B的下近似和上近似定义如下:
$\begin{aligned} \underline{R_{B}}(X)=& \left\{x \in U \mid[x]_{B} \subseteq X\right\}=\\ & \cup\left\{[x]_{B} \mid[x]_{B} \subseteq X\right\}, \\ \overline{R_{B}}(X)=& \left\{x \in U \mid[x]_{B} \cap X \neq \emptyset\right\}=\\ & \cup\left\{[x]_{B} \mid[x]_{B} \cap X \neq \emptyset\right\} . \end{aligned}$
序对($\underline {{R_B}}$ (X), $\overline {{R_B}}$ (X))称为X关于属性集B的Pawlak粗糙集, 显然,
$\underline {{R_B}} (X) \subseteq X \subseteq \overline {{R_B}}(X).$
一个决策系统是一个二元组(U, C∪ {d}), 其中, (U, C)为一个信息系统, C为条件属性集, d∉C为决策属性, d∶ U→ Vd, 不失一般性, 假设Vd={1, 2, …, r}.决策属性d确定一个等价关系
Rd={(x, y)∈ U× U|d(x)=d(y)},
它把论域U划分成两两不相交的决策类
U/Rd={D1, D2, …, Dr},
其中,
Dj={x∈ U|d(x)=j}, j=1, 2, …, r.
特别地, 对于x∈ U, 若x的决策是j, 则
[x]d={y∈ U|d(y)=d(x)=j}=Dj
为对象x的决策类.
如果RC⊆Rd, 那么称决策系统S=(U, C∪ {d})是协调的, 否则称S是不协调的.
对于B⊆C, 记
∂ B(x)={d(y) |y∈ [x]B}, x∈ U,
称∂ B(x)为决策系统S中对象x关于属性集B的广义决策值.显然, 决策系统S是协调的当且仅当对∀ x∈ U, 都有|∂ C(x)|=1, 其中|X|表示集合X的基数.
定义1[29] 设U为非空有限论域, 集函数m∶ P(U)→ [0, 1](P(U)表示U的子集全体)称为mass函数(基本概率指派), 若满足
$m(\O) = 0, \mathop \sum \limits_{A \subseteq U} m(A) = 1.$
称A∈ P(U)为m的焦元, 若m(A)> 0.记
M={A∈ P(U)|m(A)> 0},
则序对(M, m)称为U上的一个信任结构.
定义2[29] 设(M, m)为U上的一个信任结构, 集函数Bel∶ P(U)→ [0, 1]称为U上的信任函数, 若
$Bel(X) = \mathop \sum \limits_{A \subseteq X} m(A), \forall X \in P(U).$
集函数Pl∶ P(U)→ [0, 1]称为U上的似然函数, 若
$Pl(X) = \mathop \sum \limits_{A⋂X \ne \O } m(A), \forall X \in P(U).$
由同一信任结构导出的信任函数与似然函数是对偶的, 即∀ X∈ P(U),
Pl(X)=1-Bel(~X),
且
Bel(X)≤ Pl(X),
其中
~X={x∈ U|x∉X}.
定理1[30] 设(U, A)为一个信息系统, B⊆A, X⊆U, 记
$Be{l_B}(X) = P(\underline {{{\rm{R}}_{\rm{B}}}} (X)), $
$PlB(X) = P(\overline {{{\rm{R}}_{\rm{B}}}} X))$
其中P(X)=|X|/|U|, 则BelB、PlB为U上一对对偶的信任函数与似然函数, 对应的mass函数为
mB(X)=
定义3[15] 称(U, A)为一个多尺度信息系统, 其中, U={x1, x2, …, xn}, 为一个非空有限对象集, 称为论域, A={a1, a2, …, am}, 为一个非空有限属性集, 每个属性都是多尺度属性.假设所有的属性都有I个相同的等级尺度, 则一个多尺度信息系统可表示为
(U, {
其中,
即
称
对于k=1, 2, …, I, 记
Ak={
则一个多尺度信息系统S=(U, A)可分解为I个信息系统Sk=(U, Ak), k=1, 2, …, I.
定义4[15] 称
(U, C∪ {d})=(U, {
为一个多尺度决策系统, 其中
(U, C)=(U, {
为一个多尺度信息系统,
d∉{
为一个单尺度标记属性, d∶ U→ Vd, Vd为决策属性d的值域.
类似地, 一个多尺度决策系统
S=(U, C∪ {d})=(U, {
可分解为I个具有相同决策属性的决策子系统
Sk=(U, Ck∪ {d}), k=1, 2, …, I.
上述定义假设系统中的每个属性都具有相同等级的尺度标记, 但在实际生活中, 各个属性的尺度等级个数可能不同.针对这种情形, Li等[16]提出对不同属性取不同等级尺度标记的多尺度信息系统, 称为广义多尺度信息系统.
定义5[16] 称(U, A)为一个广义多尺度信息系统, 其中, U={x1, x2, …, xn}, 为一个非空有限对象集, 称为论域, A={a1, a2, …, am}, 为一个非空有限属性集, 每个属性都是多尺度属性.假设属性aj有Ij个等级尺度标记, 则一个广义多尺度信息系统可表示为
S=(U, {
其中,
即
称
S=(U, C∪ {d})=(U, {
为一个广义多尺度决策系统, 其中,
(U, C)=(U, {
为一个广义多尺度信息系统,
d∉{
为一个单尺度标记决策属性, d∶ U→ Vd, Vd为决策属性d的值域.
如果定义5中的
I1=I2=…=Im=I,
那么广义多尺度信息系统和广义多尺度决策系统分别退化为定义3中的多尺度信息系统和定义4中的多尺度决策系统.
在广义多尺度决策系统中知识获取的主要方法是根据决策目标对每个属性选择一个合适的尺度, 它们构成的尺度集合称为一个尺度组合, 一个尺度组合对应于一个单尺度信息系统, 再在保持相同目标约束的前提下进行属性约简、决策规则提取和不确定分析.
定义6[16] 设
S=(U, A)= (U, {
为一个广义多尺度信息系统, 若属性aj∈ A取第lj个尺度标记(1≤ lj≤ Ij), j=1, 2, …, m, 并记L=(l1, l2, …, lm), 称L为系统S=(U, A)的一个尺度组合, 记S=(U, A)的尺度组合全体为L, 则系统S=(U, A)的每个尺度组合
L=(l1, l2, …, lm)∈ L
对应一个完备信息系统SL=(U, AL), 其中
AL=(
定义7[16] 设
S=(U, A)= (U, {
为一个广义多尺度信息系统,
L1=(
若对∀ j=1, 2, …, m, 有
定理2[27] 设
S=(U, A)=(U, {
为一个广义多尺度信息系统,
L1=(
定义
$\begin{aligned} & L_{1} \wedge L_{2}=\left(l_{1}^{1} \wedge l_{1}^{2}, l_{2}^{1} \wedge l_{2}^{2}, \cdots, l_{m}^{1} \wedge l_{m}^{2}\right), \\ & _{1} \vee L_{2}=\left(l_{1}^{1} \vee l_{1}^{2}, l_{2}^{1} \vee l_{2}^{2}, \cdots, l_{m}^{1} \vee l_{m}^{2}\right), \end{aligned}$
其中
$\begin{aligned} & l_{j}^{1} \wedge l_{j}^{2}=\min \left\{l_{j}^{1}, l_{j}^{2}\right\}, \\ & l_{j}^{1} \vee l_{j}^{2}=\max \left\{l_{j}^{1}, l_{j}^{2}\right\}, \\ & \forall j=1, 2, \cdots, m, \end{aligned}$
则
L1⪯L2⇔ L1∧ L2=L1⇔ L1∨ L2=L2.
并且, (L, ⪯, ∧ , ∨ )为一个有界格, 显然它是一个完备格, 其中最大元是(I1, I2, …, Im), 最小元是(1, 1, …, 1).
对于B⊆A和L=(l1, l2, …, lm)∈ L, 记LB为限制在属性子集B上的尺度组合L.例如, 若
A={a1, a2, a3, a4}, B={a3, a4}, L=(1, 1, 2, 3)∈ L,
则LB=(2, 3), 并且记
LB={LB|L∈ L},
即LB为多尺度信息系统(U, B)的全体尺度组合.记
则
U/
其中
[x
定义8[27] 设U为非空集, A1与A2为U的2个划分, 若对∀ A1∈ A1, 存在A2∈ A2, 使A1⊆A2, 称A1比A2细或A2比A1粗, 记作A1$\sqsubseteq$A2.
定理3[27] 设
S=(U, A)=(U, {
为一个广义多尺度信息系统, B⊆A, L1∈ L, L2∈ L, 则
L1⪯L2⇒ [x
对于X⊆U, L∈ L, X关于
由定理3和上述下、上近似的定义容易得到如下定理.
定理4[27] 设
S=(U, A)=(U, {
为一个广义多尺度信息系统, B⊆A, L∈ L, L1∈ L, L2∈ L, 则∀ X⊆U,
1)
2)
3)
4)
5)
6)L1⪯L2⇒
7)L1⪯L2⇒
定理5[27] 设
S=(U, A)= (U, {
为一个广义多尺度信息系统, L∈ L, L1∈ L, L2∈ L, B⊆A, ∀ X⊆U, 记
Be
P
则Be
且信任函数与似然函数满足如下性质:
1)L1⪯L2⇒ Be
2)L1⪯L2⇒ P(X)≤ P
定义9[18] 设
S=(U, C∪ {d})=(U, {
为一个广义多尺度决策系统, 若对应于最细尺度组合L0的决策系统
是协调的, 即
对于X⊆U, Y⊆U, L∈ L, Y≠ Ø , 记
P(X|Y)=
则
记
Be
P
定理6[17] 设
S=(U, C∪ {d})=(U, {
为一个广义多尺度决策系统, 若L1∈ L, L2∈ L, 则
L1⪯L2⇒
定义10 设
S=(U, C∪ {d})=(U, {
为一个不协调的广义多尺度决策系统, L∈ L, x∈ U, 记
SL=(U, CL∪ {d})=(U, {
则
1)若
2)若
3)若
4)若
5)若
6)若Be
7)若P
在一个不协调的广义多尺度决策系统中, 对任意的尺度组合K∈ L, SK=(U, CK∪ {d})是一个不协调的决策系统.
SK关于对象x是分布局部协调的当且仅当对象x在SK中与在最细尺度组合下的系统
SK关于对象x是最大分布局部协调的当且仅当对象x在SK中与在最细尺度组合下的系统
SK关于对象x是广义决策局部协调的当且仅当对象x在SK中与在最细尺度组合下的系统
SK关于对象x是下近似局部协调的当且仅当在SK与最细尺度组合下的系统
SK关于对象x是上近似局部协调的当且仅当在SK与最细尺度组合下的系统
SK关于对象x是信任局部协调的当且仅当在SK与最细尺度组合下的系统
SK关于对象x是似然局部协调的当且仅当在SK与最细尺度组合下的系统
需要注意的是, 若
S=(U, C∪ {d})=(U, {
为一个协调的广义多尺度决策系统, 则7种局部最优尺度组合是等价的.但是, 在不协调的广义多尺度决策系统中, 对于∀ L∈ L, SL=(U, CL∪ {d})是不协调的决策系统.下面讨论定义10给出的7种局部最优尺度组合之间的关系.
定理7 设
S=(U, C∪ {d})=(U, {
为一个不协调的广义多尺度决策系统, L∈ L, x∈ U, 若
则
1)
2)
证明 先证1).直接验证可得.
再证2).由L0⪯L可得
可得
$\begin{aligned} j \in \partial_{c^{L}}(x) \Rightarrow & [x]_{c^{L}} \cap D_{j} \neq \emptyset \Rightarrow \\ & P\left(D_{j} \mid[x]_{c^{L}}\right)> 0 \Rightarrow \\ & P\left(D_{j} \mid[x]_{c^{L} 0}\right)> 0 \Rightarrow \\ & [x]_{c^{L_{0}}} \cap D_{j} \neq \emptyset \Rightarrow \\ & j \in \partial_{c^{L_{0}}}(x) . \end{aligned}$
这说明
因此
证毕.
下面举例说明定理7的逆命题一般不成立.
例1表1给出一个不协调广义多尺度决策系统S=(U, C∪ {d}), 其中, U={x1, x2, …, x6}, C={a1, a2}, 属性a1有2个尺度, 属性a2有1个尺度.因此, (U, C)有2个尺度组合L1=(1, 1), L2=(2, 1).
| 表1 例1中不协调的广义多尺度决策系统 Table 1 Inconsistent generalized multi-scale decision system in Example 1 |
表1中列出L1、L2尺度组合下广义决策函数和分布的取值.对于x3∈ U, 经计算
从而L1=(1, 1)是x3唯一的下近似局部最优尺度组合, 也是x3的分布局部最优尺度组合, 但是可验证
从而L2=(2, 1)是x3的唯一的上近似局部最优尺度组合, 又是x3的广义决策局部最优尺度组合, 也是x3的最大分布局部最优尺度组合.这说明
例2 (续例1) 对于x5∈ U, 经计算
从而L1=(1, 1)是x5的唯一的上近似局部最优尺度组合, 也是x5的分布局部最优尺度组合, 但是可验证
从而L2=(2, 1)是x5的唯一的下近似局部最优尺度组合, 又是x5的广义决策局部最优尺度组合, 也是x5的最大分布局部最优尺度组合.这说明
从例1和例2可知, 一个不协调广义多尺度决策系统的上近似局部协调性与下近似局部协调性无强弱联系.
例3表2给出一个不协调广义多尺度决策系统S=(U, C∪ {d}), 其中, U={x1, x2, x3, x4}, C={a1, a2}, 属性a1有2个尺度, 属性a2有1个尺度.因此, (U, C)有2个尺度组合L1=(1, 1), L2=(2, 1).
| 表2 例3中不协调的广义多尺度决策系统 Table 2 Inconsistent generalized multi-scale decision system in Example 3 |
表2中列出L1、L2尺度组合下广义决策函数和分布的取值.对于x1∈ U, 经计算
$\begin{aligned} & \underline{R_{C L_{1}}}\left(\left[x_{1}\right]_{d}\right)=\left\{x_{3}\right\}, \underline{R_{C L_{1}}}\left(\left[x_{1}\right]_{d}\right)=\emptyset, \\ & \overline{R_{C^{L_{1}}}}\left(\left[x_{1}\right]_{d}\right)=\left\{x_{1}, x_{2}, x_{3}\right\}, \overline{R_{C L_{2}}}\left(\left[x_{1}\right]_{d}\right)=U, \end{aligned}$
从而L1=(1, 1)是x1的唯一的下近似局部最优尺度组合, 也是x1的上近似局部最优尺度组合, 但是可验证L2=(2, 1)是x1的唯一的分布局部最优尺度组合.这说明
从例1和例3可知, 一个不协调广义多尺度决策系统的分布局部协调性与上近似局部协调性无强弱联系.从例2和例3可知, 一个不协调广义多尺度决策系统的分布局部协调性与下近似局部协调性无强弱联系.
例4表3给出一个不协调广义多尺度决策系统S=(U, C∪ {d}), 其中, U={x1, x2, x3, x4}, C={a1, a2}, 属性a1有2个尺度, 属性a2有1个尺度.因此, (U, C)有2个尺度组合L1=(1, 1), L2=(2, 1).
| 表3 例4中不协调的广义多尺度决策系统 Table 3 Inconsistent generalized multi-scale decision system in Example 4 |
表3中列出L1、L2尺度组合下广义决策函数的取值.对于x1∈ U, 经计算L1=(1, 1)是x1的唯一的广义决策局部最优尺度组合, 但是可验证
从而L2=(2, 1)是x1的唯一的下近似局部最优尺度组合.这说明
从例1和例4可知, 一个不协调广义多尺度决策系统的广义决策局部协调性与下近似局部协调性无强弱联系.
例5(续例1) 对于x1∈ U, 经计算L1=(1, 1)是x1的唯一的广义决策局部最优尺度组合, 但是可验证
$\begin{aligned} & \overline{R_{C L_{1}}}\left(\left[x_{1}\right]_{d}\right)=\overline{R_{C^{L_{2}}}}\left(\left[x_{1}\right]_{d}\right)=\left\{x_{1}, x_{2}, x_{3}, x_{4}, x_{5}\right\}, \\ & \gamma_{C^{L_{1}}}\left(x_{1}\right)=\gamma_{C^{L_{2}}}\left(x_{1}\right)=\left\{\left\{x_{1}, x_{2}, x_{3}, x_{4}\right\}\right\}, \end{aligned}$
从而L2=(2, 1)是x1的唯一的上近似局部最优尺度组合, 也是x1的最大分布局部最优尺度组合.这说明
从例2和例5可知, 一个不协调广义多尺度决策系统的广义决策局部协调性与上近似局部协调性无强弱联系.
例6表4给出一个不协调广义多尺度决策系统S=(U, C∪ {d}), 其中, U={x1, x2, x3}, C={a1, a2}, 属性a1有2个尺度, 属性a2有1个尺度.因此, (U, C)有2个尺度组合L1=(1, 1), L2=(2, 1).
| 表4 例6中不协调的广义多尺度决策系统 Table 4 Inconsistent generalized multi-scale decision system in Example 6 |
表4列出L1、L2尺度组合下广义决策函数和分布的取值.对于x1∈ U, 经计算
从而L1=(1, 1)是x1的唯一的最大分布局部最优尺度组合, 但是可验证
从而L2=(2, 1)是x1的唯一的广义决策局部最优尺度组合, 也是x1的上近似局部最优尺度组合.这说明
从例5和例6可知, 一个不协调广义多尺度决策系统的最大分布局部协调性与广义决策局部协调性无强弱联系.同理, 从例2和例6可知, 一个不协调广义多尺度决策系统的最大分布局部协调性与上近似局部协调性无强弱联系.
例7
从而L1=(1, 1)是x1的唯一的最大分布局部最优尺度组合, 但是可验证
从而L2=(2, 1)是x1的唯一的下近似局部最优尺度组合.这说明
| 表5 例7中不协调的广义多尺度决策系统 Table 5 Inconsistent generalized multi-scale decision system in Example 7 |
从例1和例7可知, 一个不协调广义多尺度决策系统的最大分布局部协调性与下近似局部协调性无强弱联系.
定理8 设
S=(U, C∪ {d})=(U, {
为一个不协调的广义多尺度决策系统, L∈ L, x∈ U, 则下述等价:
1)
2)Be
证明
1)⇒ 2).若1)成立, 则
$\begin{aligned} & \underline{R_{c^{L}}}\left([x]_{d}\right)=\underline{R_{c L_{0}}}\left([x]_{d}\right) \Rightarrow \\ & \quad P\left(\underline{R_{c^{L}}}\left([x]_{d}\right)\right)=P\left(\underline{R_{c L_{0}}}\left([x]_{d}\right)\right) \Rightarrow \\ & \quad B e l_{c^{L}}\left([x]_{d}\right)=\operatorname{Bel}_{c^{L_{0}}}\left([x]_{d}\right) .\end{aligned}$
2)⇒ 1).若2)成立, 则
$\begin{array}{l}\operatorname{Bel}_{C^{L}}\left([x]_{d}\right)=\operatorname{Bel}_{c^{L_{0}}}\left([x]_{d}\right) \Rightarrow \\\left|\underline{R_{c^{L}}}\left([x]_{d}\right)\right|=\left|\underline{R_{c^{L}_{0}}}\left([x]_{d}\right)\right| .\end{array}$
由定理4知,
从而
证毕.
定理8说明L是对象x的信任局部最优尺度组合当且仅当L是对象x的下近似局部最优尺度组合.下述定理9表明, 信任函数能刻画不协调广义多尺度决策系统中的下近似局部最优尺度组合的数值特征.
定理9 设
S=(U, C∪ {d})=(U, {
为一个不协调的广义多尺度决策系统, L∈ L, x∈ U, L是对象x的下近似局部最优尺度组合当且仅当如下条件成立:
1)Be
2)对∀ K∈ L, 满足L≺K(若{K∈ L|L≺K}≠ Ø ), 有
Be
证明 由定理8知, SL=(U, CL∪ {d})关于对象x是下近似局部协调的当且仅当
Be
从而由定理5可知SK=(U, CK∪ {d})关于对象x不是下近似局部协调的当且仅当
Be
因此, L是对象x的下近似局部最优尺度组合与条件1) 和条件2) 同时成立等价.
证毕.
定理10 设
S=(U, C∪ {d})=(U, {
为一个不协调的广义多尺度决策系统, L∈ L, x∈ U, 则下述等价:
1)
2)P
证明
1)⇒ 2).若1)成立, 则
$\begin{gathered} \overline{R_{C L}}\left([x]_{d}\right)=\overline{R_{c^{L}_{0}}}\left([x]_{d}\right) \Rightarrow \\ P\left(\overline{R_{c^{L}}}\left([x]_{d}\right)\right)=P\left(\overline{R_{c^{L_{0}}}}\left([x]_{d}\right)\right) \Rightarrow \\ P l_{C^{L}}\left([x]_{d}\right)=P l_{c^{L_{0}}}\left([x]_{d}\right) . \end{gathered}$
2)⇒ 1).若2)成立, 则
$\begin{array}{l}P l_{C^{L}}\left([x]_{d}\right)=P l_{c^{L}_{0}}\left([x]_{d}\right) \Rightarrow \\\quad\left|\overline{R_{C L}}\left([x]_{d}\right)\right|=\left|\overline{R_{c L_{0}}}\left([x]_{d}\right)\right| .\end{array}$
由定理4知,
从而
证毕.
定理10说明L是对象x的似然局部最优尺度组合当且仅当L是对象x的上近似局部最优尺度组合.
定理11 设
S=(U, C∪ {d})= (U, {
为一个不协调的广义多尺度决策系统, L∈ L, x∈ U, 则L是对象x的上近似局部最优尺度组合当且仅当如下条件成立:
1)P
2)对∀ K∈ L, 满足L≺K(若{K∈ L|L≺K}≠ Ø ), 有
P
证明 由定理10知, SL=(U, CL∪ {d})关于对象x是上近似局部协调的当且仅当
P
从而由定理5知SK=(U, CK∪ {d})关于对象x不是上近似局部协调的当且仅当
P
因此, L是对象x的上近似局部最优尺度组合与条件1) 和条件2) 同时成立等价.
证毕.
定理11表明, 似然函数能刻画不协调广义多尺度决策系统中的上近似局部最优尺度组合的数值特征.
图1以简洁形式给出定义10中7种协调性概念之间强弱关系.因此, 定义10实际上只有5种类型的对象x的局部最优尺度组合, 即分布局部最优尺度组合、最大分布局部最优尺度组合、广义决策局部最优尺度组合、上近似局部最优尺度组合(它与似然局部最优尺度组合等价)、下近似局部最优尺度组合(它与信任局部最优尺度组合等价).
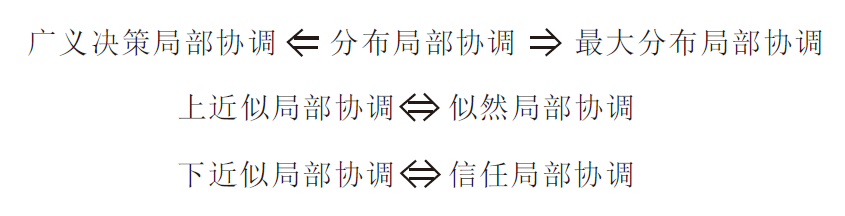 | 图1 7种局部协调性之间的关系Fig.1 Relationships of 7 types of local consistence for an object |
需要指出的是, 与本文7种局部最优尺度组合和相应的7种协调性对应有7种系统最优尺度组合和相应的7种协调性概念, 文献[28]给出它们之间的关系, 与本文局部最优尺度组合和对应的协调性的关系差别较大的是:系统的最优尺度实际上只有4种, 即系统的分布最优尺度组合、最大分布最优尺度组合、广义决策最优尺度组合(它与上近似最优尺度组合概念等价, 也与似然最优尺度组合概念等价)、下近似最优尺度组合(它与信任最优尺度组合概念等价).系统尺度组合的分布协调性最强, 它可推出其它6种协调性, 而系统尺度组合的上近似协调性可推出下近似协调性.因此, 系统尺度组合的7种协调性之间的关系与局部尺度组合的7种协调性之间关系相差较大, 在数据分析实际应用中不能混淆.
在给定的不协调广义多尺度决策系统中, 知识发现的关键问题是选择合适的决策子系统.系统的最优尺度组合的作用就是确定保持某种性质不变(可以是定性的也可以是定量的)的最优决策子系统.在现实生活中, 人们有时希望对系统中的所有数据进行观察、表示、分析和做出决策, 有时却只关心单个对象记录或事例的知识发现问题.由于系统的最优尺度组合不一定是对象的最优尺度组合, 因此需要确定局部最优尺度组合, 做出适合单个对象的决策.本文针对每个对象, 在不协调的广义多尺度决策系统中给出7种局部最优尺度组合的定义, 并对比分析这些概念之间的相互关系, 得出完整的关系, 证明本质上只有5种不同的局部最优尺度组合概念.在后续研究中, 一方面可在局部最优尺度组合基础上进行相应的局部约简及IF-THEN规则的提取, 另一方面可进一步研究各种更复杂多尺度决策系统(如不完备广义多尺度决策系统、序广义多尺度决策系统、集值广义多尺度决策系统、多属性决策系统等)在各种意义下的局部最优尺度组合选择及相应局部约简和局部IF-THEN决策规则提取等问题.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|