连续环境中基于语义拓扑图的视觉语言导航推理
 , 许明
, 许明 Semantic Topological Maps-Based Reasoning for Vision-and-Language Navigation in Continuous Environments
XIE Zilong1 , XU Ming1
, XU Ming 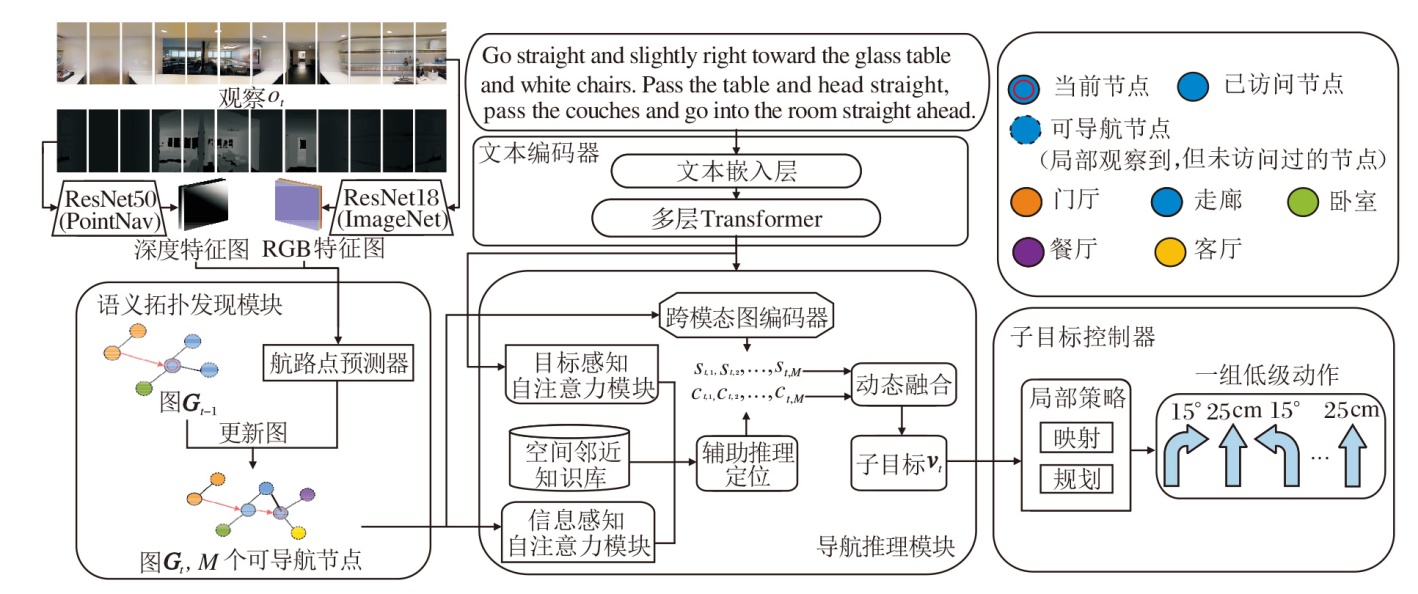
连续环境中基于语义拓扑图的视觉语言导航推理 |
|
谢子龙, 许明 |
Semantic Topological Maps-Based Reasoning for Vision-and-Language Navigation in Continuous Environments |
|
XIE Zilong
, XU Ming |
| STMR整体框架图 |
| |