







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
融合数据质量增强和时空信息编码网络的船舶海上轨迹预测方法
[石悦1, 2  , 罗贺
, 罗贺1, 2, 3 , 蒋儒浩4 , 王国强1, 2, 3 ]
, 罗贺, 蒋儒浩, 王国强]
|
|


作者简介: 
石 悦,博士研究生,主要研究方向为移动目标轨迹预测、低轨卫星网络任务规划.E-mail:2022110764@mail.hfut.edu.cn. 
罗 贺,博士,教授,主要研究方向为多主体协同优化、智能决策.E-mail:luohe@hfut.edu.cn. 
蒋儒浩,博士,讲师,主要研究方向为多无人机任务规划.E-mail:jiangrh@mail.hfut.edu.cn.
高精度的海上船舶轨迹预测是降低船舶碰撞风险、提升船舶搜救效率的重要基础.海上航行环境的多变性使船舶轨迹数据在时间和空间上具有高度复杂性,现有方法对船舶轨迹数据的质量及运动信息关注度不足,难以充分捕捉轨迹中的时空特征和关联信息.因此,文中提出融合数据质量增强和时空信息编码网络的船舶海上轨迹预测方法(Ship Maritime Trajectory Prediction Method Integrating Data Quality Enhancement and Spatio-Temporal Information Encoding Network, DQE-STIEN).首先,基于船舶轨迹数据的特征,设计结合哈希映射分类及局部离群哈希值异常检测的数据质量增强算法,对问题数据进行质量增强.然后,针对多属性的船舶轨迹数据,设计具有双编码通道的时空信息编码网络,充分提取并整合船舶轨迹数据中的位置信息与运动特征.最后,基于时空信息编码提取数据中的时空关联信息,并经解码生成完整的轨迹预测结果.在5个不同区域的AIS数据集上的实验表明DQE-STIEN性能较优.同时,DQE-STIEN具有一定的泛化性,也能有效分析能源、销售、环境和金融等领域的时序数据.
About Author:
SHI Yue, Ph.D. candidate. His research interests include moving target trajectory prediction and low-orbit satellite network mission planning.
LUO He, Ph.D., professor. His research interests include multi-subject collaborative opti-mization and intelligent decision-making.
JIANG Ruhao, Ph.D., lecturer. His research interests include multi-UAV mission planning.
High-precision maritime vessel trajectory prediction is crucial for reducing collision risks and enhancing search and rescue efficiency. The dynamic maritime environment renders vessel trajectory data highly complex in both temporal and spatial dimensions. Existing methods exhibit insufficient attention to the quality and movement information of vessel trajectory data, making it challenging to fully capture the spatio-temporal features and correlations effectively. To address these issues, a ship maritime trajectory prediction method integrating data quality enhancement and spatio-temporal information encoding network(DQE-STIEN) is proposed. First, based on the characteristics of vessel trajectory data, a data quality enhancement algorithm is designed by combining hash mapping classification and local outlier factor-based anomaly detection using hash values to improve the quality of problematic data. Then, a spatio-temporal information encoding network with dual encoding channels is tailored for multi-attribute vessel trajectory data to extract and integrate positional information and movement features comprehensively. Finally, the spatio-temporal associations within the data are encoded and decoded to generate complete trajectory prediction results. Experimental results on AIS datasets from five different regions demonstrate the superior performance of DQE-STIEN. Moreover, DQE-STIEN exhibits certain generalizability, making itself effective for analyzing time-series data across various fields such as energy, sales, environment and finance.
预测轨迹能有效避免或降低船舶潜在的碰撞风险, 同时提升针对遇险船舶的快速定位和搜救能力, 所以利用预测技术预判船舶未来航行轨迹在船舶航行安全领域具有重要意义, 针对船舶轨迹预测的研究与实践已成为国际航运及安全领域内持续深入探讨的重要议题之一[1].
在海面航行过程中, 船舶的行为模式受多种复杂因素的影响[2], 如航行状态、海面风场和海流变化、航道限制及交通管理策略等[3], 并且由于不存在河道或路网的约束, 海上船舶的轨迹数据在时间和空间上更复杂.尽管如此, 船舶的海上轨迹变化趋势仍具有一定规律[4], 如何构建高效的时空预测模型, 充分挖掘船舶海上轨迹数据在时间和空间上的变化特征并进行合理预测是船舶海上轨迹预测问题的一个重要挑战.
当前主要基于船舶自动识别系统(Automatic Identification System, AIS)数据开展针对船舶海上轨迹的预测研究[5].AIS数据中蕴含丰富的船舶行为和运动信息, 但其原始数据可靠性较低[6]、质量较差.高质量的轨迹数据是构建可靠轨迹预测方法的基础, 对船舶轨迹数据执行预处理、校正误差、填补缺失值以及精细化的时空分析等措施, 能显著提升模型对船舶动态行为建模的能力[7].然而, 现有时序预测研究对数据质量的重视程度不高.一般的时间序列清洗主要基于经验规则[8]、分类[9]及人工清洗[10]等方式进行.在船舶海上轨迹预测问题中, 基于经验的数据清洗会忽略船舶轨迹数据中的属性特征, 无法充分探索利用其中潜在的时空模式.
船舶海上轨迹问题是轨迹预测研究领域的一个重要分支, 即无路网限制条件下的二维移动目标轨迹预测.轨迹预测本质是时间序列预测问题的一种特殊应用.近年来, 数据驱动是实现时间序列预测的主流方法, 包括:传统的基于统计的时序建模, 如在众多领域的时序预测研究上被广泛应用的ARIMA(Autoregressive Integrated Moving Average)衍生模型[11, 12]; 基于机器学习的时序预测模型[13, 14, 15, 16, 17], 如循环神经网络(Recurrent Neural Network, RNN)、图神经网络(Graph Neural Network, GNN)、Transformer及各类变体.此外, 基于统计方法和机器学习的混合时序建模因其良好的预测表现也成为当前时序预测领域的研究热点之一[18].
具体到船舶海上轨迹预测问题, 基于AIS数据的船舶轨迹预测方法具体可分为基于统计和船舶动力学方程的船舶轨迹预测方法、基于单一机器学习模型的船舶轨迹预测方法和多种机器学习模型混合的船舶轨迹预测方法[19].
在基于统计和船舶动力学方程的船舶轨迹预测方法[20, 21, 22, 23]中, 基于卡尔曼滤波器(Kalman Filter, KF)、指数平滑、高斯混合模型及ARIMA等统计方法应用船舶历史轨迹和内在假设的短期线性轨迹预测, 能实现较优效果, 而基于单纯船舶动力学的轨迹预测方法主要在理想条件下剖析船舶的运动规律, 据此计算船舶未来的运动轨迹[24].上述方法假设依赖性较强、环境适应性较差, 在无内在假设或非理想条件下往往预测精度较低.
在基于单一机器学习模型的船舶轨迹预测方法中, 反向传播神经网络的出现使船舶轨迹的预测精度得到大幅提升[25], 而随着神经网络技术的不断演化, 深度学习方法作为其最新发展阶段在船舶轨迹预测研究领域中逐渐占据显著地位[26, 27].
基于船舶轨迹数据的时序性和长期依赖性特征, 序列到序列(Sequence to Sequence, Seq2Seq)模型架构逐渐被广泛应用于船舶运动序列数据的预测[28], 其核心构成是RNN, 这种循环结构中具有循环流动的信息记忆和更新机制, 能有效记忆历史信息并适时更新状态以适应新输入[29].随后RNN的基础架构不断得到优化与扩展, 使用其进阶变体, 如门控循环单元(Gated Recurrent Unit, GRU)、长短期记忆网络(Long Short-Term Memory, LSTM)等模型[30, 31], 能有效克服传统RNN因梯度消失而难以建模长期依赖的局限, 提升轨迹预测的准确性与稳定性.
近年来, 卷积神经网络(Convolutional Neural Net-work, CNN)、生成对抗网络、以注意力机制为核心的Transformer等前沿网络结构与方法[32, 33, 34]也已在船舶轨迹预测的研究中得到深入应用.尽管这类模型通常具备较强的泛化性和学习性, 能较好地应对复杂的轨迹数据, 但此类方法通常单独预测船舶轨迹数据中的经度与纬度, 本质是将船舶轨迹数据视为多属性时间序列进行研究, 忽略数据间的特征关联, 造成复杂依赖关系捕捉不足, 丢失船舶轨迹数据中的空间相关性信息和不同维度之间的交互信息.
在此基础上, 学者们开始尝试结合不同的深度学习方法, 设计多种机器学习模型混合的船舶轨迹预测方法, 持续优化船舶轨迹预测精度[35].Cen等[36]和Lee等[37]分别使用CNN结合GRU和LSTM, 设计混合船舶轨迹预测模型, 预测不同场景下的船舶轨迹.Wang等[38]采用时空图卷积神经网络, 构建DAA-SGCN(Deep Attention-Aware Spatio-Temporal Graph Convolutional Network), 捕捉多船之间的空间交互特征的时间依赖关系.Liu等[39]构建融合图神经网络、Transformer及LSTM的时空多图变压器网络ST-MGT(Spatio-Temporal Multi-graph Transformer Network), 学习船舶交互信息特征, 同时预测多船轨迹.这类方法通过融合不同预测方法在特征提取和时序建模上的优势, 有效提升预测方法对轨迹数据状态变化模式的学习能力, 使模型在表现更优的同时具有较好的稳健性.然而, 现有研究中对数据质量的关注度较低, 普遍存在知识预先提取的现象, 同时, 这类方法往往较少关注船舶的运动信息, 忽略船舶的动力学特性, 使模型无法充分学习数据中蕴含的时空信息.
总之, 当前船舶海上轨迹预测方法仍存在两个主要挑战:1)数据质量问题, 如数据重复、异常及缺失等导致的预测误差; 2)船舶运动轨迹蕴含的复杂时空特征, 如地理位置分布、数据变化趋势等难以被现有模型充分挖掘和建模.因此, 亟需提出一种船舶海上轨迹预测方法, 实现对原始船舶轨迹数据的有效清洗, 增强数据质量, 同时深入关注船舶位置信息与运动状态的异质性和内在关联, 将船舶运动轨迹与其复杂时空环境进行统一建模, 提升轨迹预测精度.
为了应对上述挑战, 本文提出融合数据质量增强和时空信息编码网络的船舶海上轨迹预测方法(Ship Maritime Trajectory Prediction Method Integra-ting Data Quality Enhancement and Spatio-Temporal Information Encoding Network, DQE-STIEN).一方面, 基于船舶轨迹数据内在特征进行数据分类及异常检测, 实现数据质量的有效增强; 另一方面进行过程控制, 设计基于时空信息编码的轨迹预测网络, 通过双编码通道对数据的时空信息进行充分提取和编码, 高效整合轨迹数据中位置信息和运动状态, 增强预测模型对数据中复杂的时空信息特征的学习能力, 实现预测精度的有效提升.通过对比实验验证DQE-STIEN在预测精度上的优越性与稳健性, 并通过消融实验验证方法中各模块的作用, 此外还在能源、销售、环境和金融等不同领域的数据集上评估DQE-STIEN的泛化性.
船舶海上轨迹预测问题具体可描述如下.在随机海域环境中存在一艘持续规律移动的非特定类型船舶, 需要根据该船舶过去t个时间步长的历史轨迹Tt, 预测该船舶未来k个时间步长的航行轨迹Tt+k.其中, 船舶历史轨迹
Tt=(P1, P2, …, Pi, …, Pt), t∈ N+.
Tt中包含t个采样间隔相等的轨迹点
Pi =(LATi, LONi, SOGi, COGi)∈ R4,
蕴含该船舶在点Pi处的纬度LATi、经度LONi、对地航速SOGi、对地航向COGi信息.船舶在不同时刻所处位置不同, 但其历史轨迹在时间上和空间上均呈现连续缓慢变化.
船舶海上轨迹预测问题需要学习船舶在过去t个时间步长的历史轨迹数据在时间和空间上的变化模式, 挖掘船舶位置信息与运动状态的内在关联, 以此合理推断该船舶在未来k个时间步长的轨迹点信息.
针对某船舶在随机海域的轨迹预测过程如图1所示.此时设定t = 30, k = 5, 表明已获取的船舶历史轨迹中包含30个轨迹点Pi, i=1, 2, …, 30, 即该船舶过去30个时间步长的位置变化信息和运动状态信息, 以此学习船舶轨迹数据的变化模式, 预测该船舶未来5个时间步长的轨迹点, 输出未来5个轨迹点的经纬度坐标集合:
{(LAT31, LON31), (LAT32, LON32), (LAT33, LON33),
(LAT34, LON34), (LAT35, LON35)}.
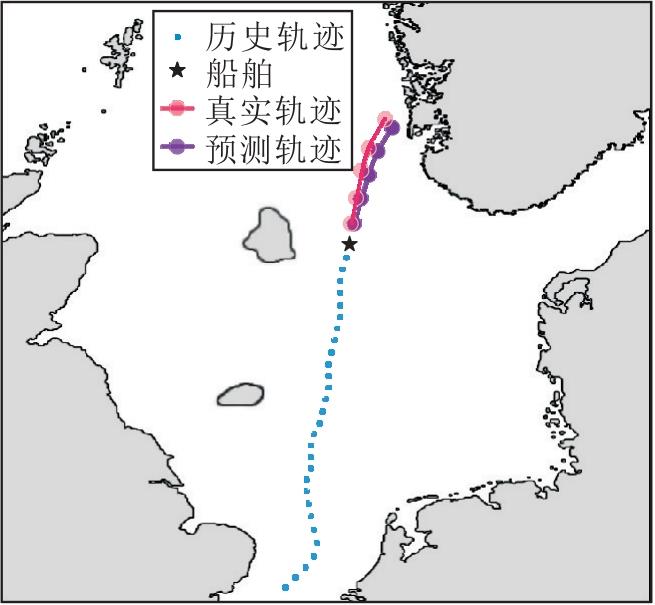 | 图1 船舶海上轨迹预测问题示意图Fig.1 Schematic diagram of ship maritime trajectory prediction problem |
针对船舶海上轨迹预测问题, 本文提出融合数据质量增强和时空信息编码网络的船舶海上轨迹预测方法(DQE-STIEN), 总体框架如图2所示.DQE-STIEN主要包含4个核心模块.
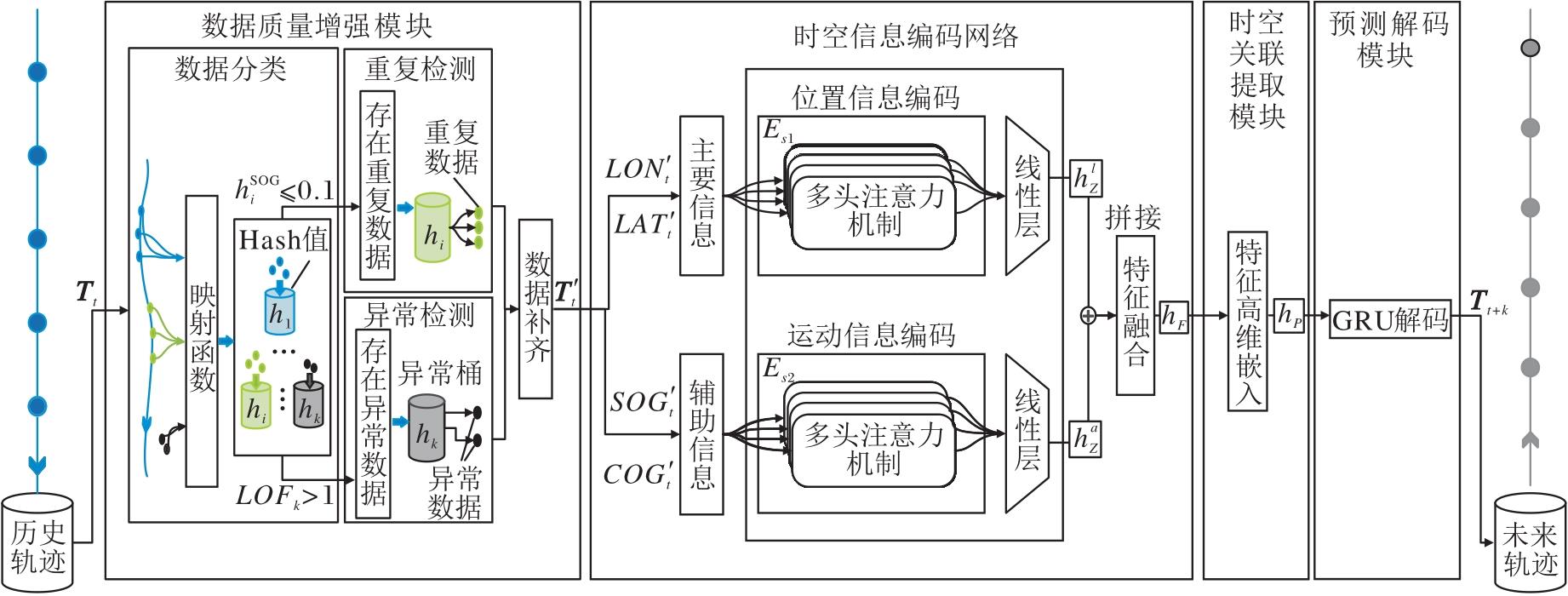 | 图2 DQE-STIEN总体框架Fig.2 Overall framework of DQE-STIEN |
1)数据质量增强模块.针对船舶轨迹数据中存在的数据重复、异常及缺失等问题, 设计基于哈希映射分类及局部离群哈希值异常检测的数据质量增强算法(Hash Mapping-Based Classification and Local Outlier Detection via Hash Value Anomalies, HMC-LODH), 实现船舶轨迹数据质量的提升.
2)时空信息编码网络.为了对船舶轨迹数据中的时空特征进行更深入的挖掘, 设计时空信息编码网络(Spatio-Temporal Information Encoding Network, STIEN), 进行并行特征编码.
3)时空关联提取模块.为了进一步提取船舶在不同时段内的运动规律与位置间的时空关联信息, 采用CNN对融合特征进行高维嵌入, 捕捉复杂的时空交互特性.
4)预测解码模块.在提取的高维特征基础上, 利用GRU进行解码, 生成完整的船舶轨迹预测结果.
数据质量增强模块主要解决数据质量问题, 而时空信息编码网络、时空关联提取模块和预测解码模块共同应对轨迹数据中复杂时空特征建模的挑战.
为了实现对原始船舶轨迹数据的质量提升, 本文在传统的时序数据清洗技术的基础上提出基于哈希映射分类及局部离群哈希值异常检测的数据质量增强算法(HMC-LODH), 引入高效的哈希映射, 对数据进行快速分类, 并结合局部离群因子(Local Outlier Factor, LOF), 检测轨迹数据中的局部异常, 显著提升清洗效率和对局部特征的识别能力.同时, 采用三次样条插值方法对剔除后的数据及原有的缺失数据一同进行平滑插补, 进一步优化轨迹数据的连续性和质量.
2.2.1 哈希映射分类
为了快速降低数据复杂度并提高重复数据与异常数据检测的效率, 设计基于哈希映射的船舶轨迹数据分类方法.哈希映射可基于简单的运算过程在O(1)时间复杂度内完成数据分类, 而基于树或搜索的方法需要O(log2n)或更高的时间复杂度, 通过哈希映射能大幅降低大规模数据分析带来的计算瓶颈[40].
取模映射、线性映射、取整映射等映射策略较适配数据分类的需求.取模映射可将数据快速分类到不同的桶中, 分类依据是数据对模数的余数相同, 这种方法无法有效区分原始轨迹数据中的高度重复数据或相似数据, 并且映射得到的哈希值仅具有分桶功能, 缺乏实际的语义信息和对数据特征的反映.同样地, 线性映射只通过一组加权系数对数据进行线性组合, 无法有效区分高度重复数据或相似数据, 并且可能会把本应区分的数据映射到相同的值.
针对上述问题, 本文基于AIS数据变化平缓的特征, 改进原有的直接定址法, 采用取整映射的策略构造哈希函数.相比取模和线性映射, 取整映射不仅能减少哈希冲突, 还能保证分类结果的均匀性, 从而更适配AIS数据中重复性与局部特征突出的特点.此外, 取整映射的设计简单高效, 更适用于大规模轨迹数据的处理.构造的哈希函数如下:
H(x)=
其中x为输入的船舶轨迹数据.为了快速定位数据所在的桶, 本文对输入数据进行“ 十分位取整” , 将整数部分及其十分位数相同的数据映射到同一个哈希桶中, 桶内数据对哈希值标签共享.当输入船舶轨迹序列
Tt =(P1, P2, …, Pt), t∈ N+
时, 经过哈希函数的映射, 每个属性都得到分类后各个数据“ 桶” 的哈希值:
H(x) =(h1, h2, …, hn), n∈ [1, t].
2.2.2 重复值检测
船舶轨迹数据中因静止状态产生的完全重复数据或近似重复数据是一种噪声数据, 需要被剔除.本文利用哈希值H(x)进行重复值检测, 通过哈希函数映射得到由原数据的整数部分及其十分位组成的标签, 不仅能直观展现数据的分布, 还能为重复值判定提供高效的分类依据.
船舶轨迹数据的重复值检测主要针对船舶静止情况下产生的完全重复数据或近似重复数据.由于船舶轨迹数据中存在具有关联的多个属性, 本文基于对地航速(Speed over Ground, SOG)进行判定, 具体判定条件如下:H(x)≤ ε, 其中ε为静止船舶对地航速阈值.当船舶对地航速属性SOG的哈希值H(x)≤ ε时视为静止状态.
2.2.3 哈希值异常检测
数据异常检测是数据清洗中的必要步骤之一, 原始数据经过哈希映射后体量大幅下降, 每个哈希值H(x)表示一个“ 桶” 中轨迹点的分类结果, 从而可有效减少计算复杂度.船舶轨迹数据在正常情况下具有平滑变化的特征, 而异常数据通常表现出局部的波动性或突变, 具有较强的局部敏感性, 因此本文利用哈希值H(x)作为轨迹点的代表, 通过局部离群因子进行高效的异常检测.哈希值异常检测的整体流程如图3所示.
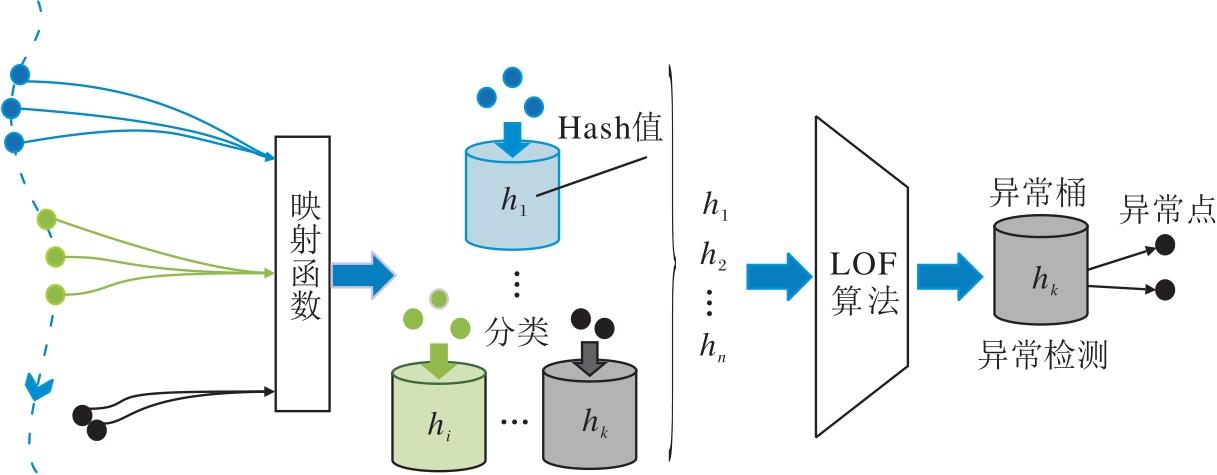 | 图3 哈希值异常检测流程图Fig.3 Flow chart of hash value anomaly detection |
局部离群因子具体计算过程如下.
1)计算hi的可达密度:
reach_dis(hi)=max(k-distance(hj ), d(hi, hj)),
其中, k-distance(hj )表示点hj与其最近的k个邻居的最大距离, d(hi, hj )表示hi、hj之间的距离.选取较小的k值可使算法对异常数据更敏感, 本文设定k值为3.
2)计算hi的局部可达密度:
LDRk(hi)=
其中Nk(hi)表示点hi的k个最近邻.
3)计算局部离群因子:
$ \operatorname{LOF}\left(h_{i}\right)=\frac{1}{\left|N_{k}\left(h_{i}\right)\right|} \sum_{j \in N_{k}\left(h_{i}\right)}\left(\frac{L D R_{k}\left(h_{i}\right)}{L D R_{k}\left(h_{j}\right)}\right) .$
每个数据点hi的LOF值是其在k-distance邻域中每个数据点的局部可达密度与邻域点的平均局部可达密度之比的平均值, LOF值接近于1时表示数据点与周围点的离群程度相似, 而LOF值远大于1时表示该点更可能属于离群点.
2.2.4 数据补齐
在进行数据补齐时, 重复值和异常值将标记为空值, 并与原始数据中的缺失值合并处理.由于三次样条插值能基于数据的二阶导数连续性生成平滑曲线, 同时其局部特性使得插值结果仅依赖于邻域点, 从而避免过拟合问题.相比线性插值, 三次样条插值更适合船舶轨迹数据的平滑变化特性.
三次样条插值器构建多个分段的三次多项式进行数据点的拟合, 对于每个子区间[xi,
Si(x)=ai(x-xi)3+bi(x-xi)2+ci(x-xi)+di,
其中, i表示区间索引, ai、bi、ci、di表示待确定的系数, 通过数据点的一阶导数和二阶导数连续约束条件以及自然边界条件确定.
经过三次样条插值器的插补处理, 可实现原始数据的修复和补齐, 得到数据质量增强的船舶历史轨迹T't, 为时空信息编码网络提供更丰富的时空特征信息.
在数据质量增强的基础上, 为了充分提取船舶海上轨迹数据的多维特征, 提升模型对数据状态变化的学习能力, 设计基于Transformer架构的时空信息编码网络(STIEN), 内部结构如图4所示.
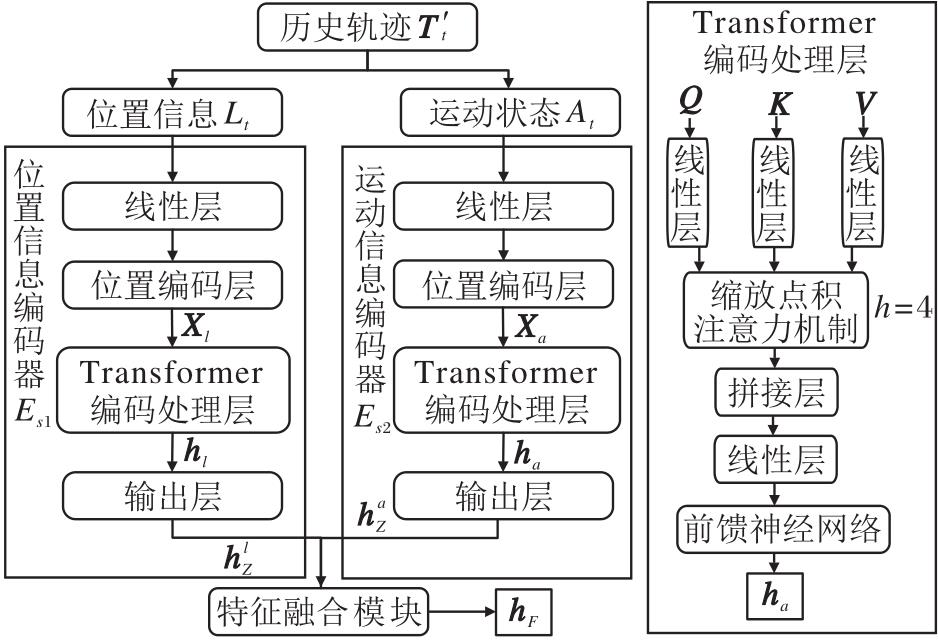 | 图4 STIEN结构图Fig.4 Structure of STIEN |
STIEN包含两个主要组件:位置信息编码器Es1和运动信息编码器Es2, 分别对船舶轨迹数据中的位置信息和运动状态进行独立编码.此外, STIEN还设计一个特征融合模块, 拼接Es1和Es2的输出编码, 生成综合的融合表示.
STIEN的双Transformer编码通道设计, 旨在捕捉位置信息与运动信息的不同特性及变化规律.在船舶轨迹数据中, 位置信息和运动信息具有不同的时间模式与依赖关系.将这两种信息分别输入独立的编码器, 可使模型更有针对性地学习两种特征的独特模式, 如地理位置的变化趋势和船舶运动中的速度和加速度变化情况.同时, 特征融合模块能进一步建模两类信息之间的交互关系, 使输出编码更全面反映船舶轨迹的多维特性.这种结构避免单一通道可能带来的特征混淆问题, 提升模型对船舶轨迹多维特性的理解能力.
相比GRU和LSTM等递归神经网络, Transfor-mer架构通过自注意力机制, 在计算时并不依赖于时间步的顺序, 能不受距离限制直接在任意两个时刻之间建立联系, 更有效捕捉长距离的依赖关系, 进行全局并行计算和上下文建模.在船舶轨迹数据中, 位置信息和运动信息是复杂且高度依赖上下文的.双Transformer通道设计允许模型在编码时分别处理两种类型的信息, 并在融合阶段综合它们的关系.这种结构能更好地理解复杂的时间序列数据, 有效避免递归神经网络编码将所有特征强行整合到单一序列中导致的特征混淆问题.
2.3.1 线性变换及位置编码
将经过数据质量增强的船舶历史轨迹Tt'输入编码器中进行特征提取.将Tt'中的位置信息
Lt={(LAT1', LON1'), (LAT2', LON2'), …, (LATt', LONt')}
和运动状态信息
At= {(SOG1', COG1'), (SOG2', COG2'), …, (SOGt', COGt')}
分别输入并行的编码器Es1和Es2中并处理.
以位置信息Lt为例, 首先通过线性层进行变换, 将输入数据Lt映射至高维空间, 使其更适合后续的特征提取.为了保留轨迹数据的时间顺序信息, 对线性变换后的特征向量H0添加正余弦位置编码.这种位置编码能确保不同位置的编码在高维空间中相互独立, 从而保留输入序列中的时间信息.经过线性变换和位置编码后, 编码器Es1与Es2分别得到向量Xl和Xa.
2.3.2 Transformer编码层
将位置编码后的向量X输入到Transformer编码器中进行特征提取和上下文编码, 计算过程如下:
$ \operatorname{Attention}(\boldsymbol{Q}, \boldsymbol{K}, \boldsymbol{V})=\operatorname{softmax}\left(\frac{\boldsymbol{Q} \boldsymbol{K}^{\mathrm{T}}}{\sqrt{d_{k}}}\right) \boldsymbol{V}, $
其中
Q=XWQ∈
K=XWK∈
V=XWV∈
分别表示经过线性变换后的查询(Query)、键(Key)和值(Value), dk表示嵌入向量维度, WQ、WK、WV表示可训练参数[41].
每个注意力头
headj=Attention(Qj, Kj, Vj),
其中, j=1, 2, …, h, h表示注意力头的数量.基于多头注意力(Multi-head Attention, MHA)机制, 将在多个并行的注意力头上执行上述操作.
通过对每个注意力头的结果进行拼接, 再利用一个可训练的输出权重矩阵WO进行变换, 可得到最终的多头注意力输出:
MHA(Q, K, V)=Concat(head1, head2, …, headh)WO.
2.3.3 特征融合
编码器Es1、Es2分别输出位置信息特征编码
hF=Concat(
融合特征hF包含船舶轨迹数据中位置信息与运动状态的上下文依赖关系, 为后续时空关联提取与预测解码提供充分的特征信息支持.
为了进一步提取船舶在不同时段内的运动规律与不同位置间的时空关联信息, 设计时空关联提取模块, 通过卷积运算对融合特征进行高维嵌入, 学习数据中潜在的局部特征模式和全局特征模式, 捕捉更复杂的时空关联.
在时空关联提取模块中, 采用一维卷积结构将融合特征编码hF输入卷积层进行高维映射, 提升数据的信息表达能力, 提取船舶在不同时段内的运动规律与位置间的关联信息.一维卷积核在时间轴上滑动, 并对hF中的各时间步特征
hP=σ(W* hF+b),
其中, W∈ R64× 4× 3, *表示一维卷积运算, b∈ R64表示偏置向量, σ(· )表示ReLU激活函数.
在预测解码模块中, 采用GRU解码器对特征序列hP进行解码, 生成目标轨迹预测结果:
Tt+k=DecoderGRU(hP).
GRU具备较强的长短期记忆能力, 同时计算复杂度较低, 与具有自注意力机制的Transformer编码器结合能形成优势互补.
在具体实现中, 本文采用具有256个隐藏单元的1层GRU架构构建解码器Dp, 捕捉特征序列hP的内部时间依赖性.最终, 解码输出通过两次线性映射将特征序列hP降至2维, 得到符合轨迹格式的目标未来轨迹序列Tt+k.
DQE-STIEN及所有基线方法均在11th Gen Intel(R) Core(TM) i7-11700F @2.50GHz、16GB RAM、64位Windows 10操作系统的环境下基于Python3.8和PyTorch1.11.0框架开发, 所有数值实验均在一块Nvidia V100 GPU上运行.
在DQE-STIEN的主要参数设置中, 迭代次数设为2 000次, 学习率设为0.000 1, 并使用Adam(Adap-tive Moment Estimation)优化器执行优化过程, 采用均方误差(Mean Squared Error, MSE)作为损失函数.DQE-STIEN采用4层的Transformer网络结构, 对于多头注意力机制, 配置4个注意力头, 每个头的嵌入维度为256.此外, 卷积操作中的卷积核大小设为3, 隐藏层的维度设为256.
本文使用的实验数据均源于美国国家海洋和大气管理局(https://www.noaa.gov)的AIS数据库, 提取来自不同海域的5个真实的船舶轨迹数据集, 数据集基本信息如表1所示, 数据采样频率经处理后均为1次/min.
| 表1 船舶轨迹数据集基本信息 Table 1 Basic information of ship trajectory dataset |
此外, 为了评估DQE-STIEN的泛化性, 自美国加州大学欧文分校维护的机器学习库(https://archive.ics.uci.edu/datasets)收集每周销售交易额(Weekly Sales Transactions)、家庭用电量(Indi-vidual Household Electric Power Consumption)、 纳斯达克股指(National Association of Securities Dea-lers Automated Quotations, NASDAQ)、北京多站点空气质量(Beijing Multi-site Air Quality)这4个分别来自能源、销售、环境和金融领域的数据集, 经处理后的数据集基本信息如表2所示.
| 表2 其它领域数据集基本信息 Table 2 Basic information of other domain datasets |
为了量化DQE-STIEN的性能, 本文选取平均预测距离误差(Mean Distance Error, MDE)、平均绝对误差(Mean Absolute Error, MAE)、均方误差(MSE)、均方根误差(Root Mean Squared Error, RMSE)、平均绝对百分比误差(Mean Absolute Percentage Error, MAPE)这5个指标评价预测精度.同时, 还采用参数量、浮点运算数(Floating Point Operations, FLPOs)、推理时间评价各方法的计算复杂度和时间成本.上述指标值越小表示性能越优.
MDE指标计算某段预测轨迹与对应的真实轨迹之间所有位置点球面距离的平均误差值, 具体公式如下:
MDE=
其中,
$ \begin{aligned} a= & \sin ^{2}\left(\frac{l a t_{\text {true }}^{i}-l a t_{\text {pred }}^{i}}{2}\right)+ \\ & \cos \left(l a t_{\text {true }}^{i}\right) \cos \left(l a t_{\text {pred }}^{i}\right) \sin ^{2}\left(\frac{l o n_{\text {true }}^{i}-l o n_{\text {pred }}^{i}}{2}\right), \end{aligned}$
R表示地球半径, 取6 378 km, i∈ N+, i≤ n, n表示该段轨迹点的数量.计算MDE时首先需要将预测点及真实点的经纬度坐标数据转换为弧度制, 得到(lo
MAE、MSE、RMSE、MAPE指标是评价方法性能和精度的常用指标, 主要用于衡量预测值与真实值之间的差距, 计算公式分别如下:
$\begin{array}{l}M S E=\frac{1}{n} \sum_{i=1}^{n}\left(y_{\text {true }}^{i}-y_{\text {pred }}^{i}\right)^{2}, \\M A E=\frac{1}{n} \sum_{i=1}^{n}\left|y_{\text {true }}^{i}-y_{\text {pred }}^{i}\right|, \\R M S E=\sqrt{\frac{1}{n} \sum_{i=1}^{n}\left(y_{\text {true }}^{i}-y_{\text {pred }}^{i}\right)^{2}}, \\M A P E=\frac{1}{n} \sum_{i=1}^{n}\left(\left|\frac{y_{\text {true }}^{i}-y_{\text {pred }}^{i}}{y_{\text {pred }}^{i}}\right|\right) \times 100 \%, \end{array}$
其中,
由于本文的预测结果同时包含经度和纬度两个属性, 因此, 上述四个指标的最终结果是将经度和纬度的指标值分别加和后取均值.
为了验证DQE-STIEN的预测性能, 本文选取如下3类10种基线方法进行对比实验.1)基于统计和船舶动力学方程的船舶轨迹预测方法:文献[20]方法、文献[21]方法、文献[23]方法.2)基于单一机器学习模型的船舶轨迹预测方法:文献[28]方法、DBDIE(Deep Bi-directional Information-Empowered)[30]、QSD-LSTM[31]、TrajBERT-DSSM[34]、文献[32]方法.3)多种机器学习模型混合的船舶轨迹预测方法:CNN-GRU[36]、CNN-LSTM[37].
DQE-STIEN及对比方法的主要参数设置、参数量和FLOPs指标如表3所示.所有对比方法的输入数据均经过必要的船舶轨迹数据提取和排序等预处理操作, 本文将所有数据集上前80%的部分作为训练数据, 使用后20%的数据进行测试.此外DQE-STIEN及所有机器学习方法的历史步长均设为30, 预测步长均设为5, 其中1个步长的时长为1 min, 通过滑动时间窗向下滑动完成整个序列的预测.
| 表3 各对比方法的主要参数设置及计算复杂度 Table 3 Main parameter settings and computational complexity of contrastive methods |
各方法在5个船舶轨迹数据集上指标值如表4~表8所示, 表中黑体数字表示最优值.由表可见, DQE-STIEN在各预测精度评价指标上均优于对比方法, 并在不同的数据集上具有较强的稳定性, 但DQE-STIEN在5个数据集上的推理时长在所有对比方法中始终靠后.
| 表4 各方法在数据集A上的指标值对比 Table 4 Metric value comparison of different methods on dataset A |
| 表5 各方法在数据集B上的指标值对比 Table 5 Metric value comparison of different methods on dataset B |
| 表6 各方法在数据集C上的指标值对比 Table 6 Metric value comparison of different methods on dataset C |
| 表7 各方法在数据集D上的指标值对比 Table 7 Metric value comparison of different methods on dataset D |
| 表8 各方法在数据集E上的指标值对比 Table 8 Metric value comparison of different methods on dataset E |
由表3可知, DQE-STIEN的参数量仅次于TrajBERT-DSSM, FLOPs指标仅次于文献[28]方法, 可见较高的计算复杂度对模型的推理时长具有负面影响.
在数据集A上, 对比基于统计和船舶动力学方程的船舶轨迹预测方法中性能较优的文献[23]方法与基于单一机器学习模型的船舶轨迹预测方法中性能最差的QSD-LSTM, 性能差距显著, 在MAE、MSE、RMSE、MAPE指标上, QSD-LSTM的性能超文献[23]方法239倍, 可见基于机器学习的预测方法在船舶海上轨迹预测精度上具有明显优势.同时, 对比基于单一机器学习模型的船舶轨迹预测方法和多种机器学习模型混合的船舶轨迹预测方法可发现, DBDIE、QSD-LSTM、文献[32]方法进行预测的精度均低于CNN-GRU或CNN-LSTM, CNN-GRU的MDE和MAPE值仅为文献[32]方法的71.45%和44.94%, 这表明混合模型在一定程度上能有效集成单一机器学习模型在特征提取或序列建模上的优势, 提升预测精度和泛化能力.
为了直观体现对比方法中预测性能最优的CNN-GRU与DQE-STIEN在船舶海上轨迹预测上的性能差异, 在数据集A上进行实验, 具体预测轨迹如图5所示.由图可见, DQE-STIEN的预测轨迹与真实轨迹的重合度明显高于CNN-GRU, 直观体现DQE-STIEN在整体预测精度上的优越性.
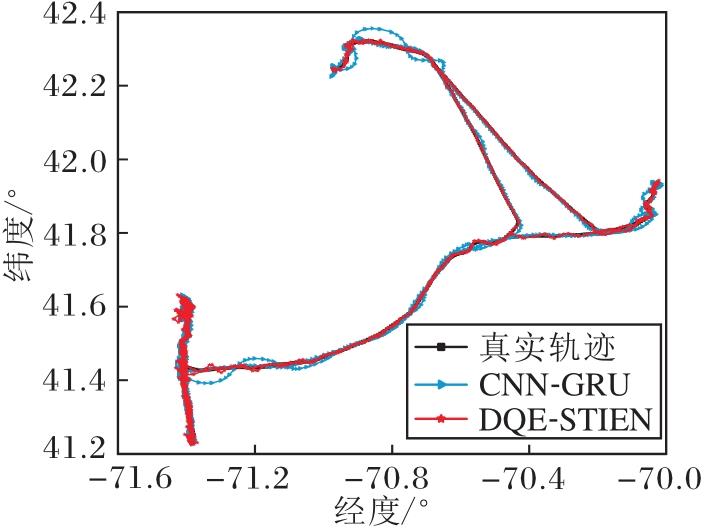 | 图5 CNN-GRU和DQE-STIEN在数据集A上的船舶海上轨迹预测结果Fig.5 Ship maritime trajectory prediction results of CNN-GRU and DQE-STIEN on dataset A |
本文进一步截取数据集A上某段直线轨迹和某段曲线轨迹, CNN-GRU和DQE-STIEN在这两段轨迹上的预测情况如图6所示.
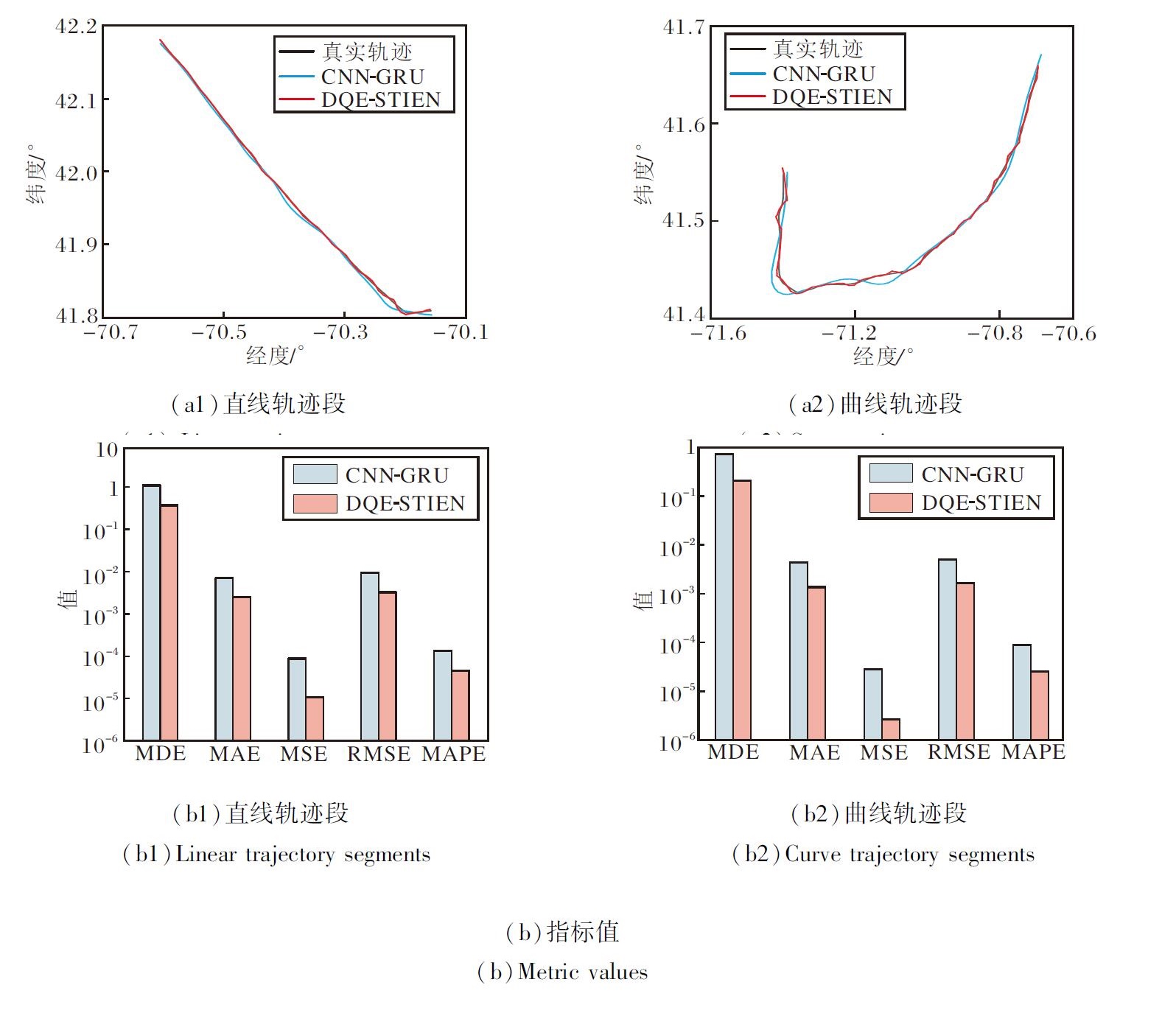 | 图6 CNN-GRU和DQE-STIEN对不同类型轨迹段预测情况对比Fig.6 Prediction result comparison of CNN-GRU and DQE-STIEN for different trajectory segments |
由图6可见, 由于直线段轨迹的运动模式简单、规律, 航行方向和速度的变化模式较稳定, 而曲线段轨迹包含的方向变化和速度变化更复杂, 对模型捕捉动态变化的能力要求较高, 因此二种方法在直线段轨迹上的预测精度明显优于曲线段轨迹.而DQE-STIEN在曲线段轨迹预测任务上同样表现良好, 与真实轨迹的重合程度明显较高, 各项预测精度评价指标均优于CNN-GRU, 可见DQE-STIEN针对不同类型轨迹的预测稳定性更高, 复杂动态建模能力更强.
为了分析DQE-STIEN中各模块在轨迹预测任务中的有效性及贡献, 定义如下方法:未进行数据质量增强的预测方法(简记为w/o Enhancement)、未添加运动信息编码器的预测方法(简记为w/o Auxi-liary)、未进行时空关联提取的预测方法(简记为w/o Convolution)、未使用时空信息编码网络进行编码的预测方法(简记为w/o Encoder)、使用LSTM替代GRU进行预测解码的预测方法(简记为w/ LS-TM Dec.).
为了直观体现各方法相比DQE-STIEN的预测性能变化, 基于MDE指标提出精度降低率(Pre-cision Reduction Rate, PRR), PRR数值越大, 表示相关子方法的预测精度下降越显著.具体计算公式如下:
PRR=
其中, MDEi表示第i个方法的MDE值, MDEDQE-STIEN表示DQE-STIEN的MDE值.
各方法在5个船舶轨迹数据集上的PRR指标分布情况如图7所示, 图中◆对应该方法的PRR值.由图可见, 各方法在不同数据集上的性能虽有差异, 但DQE-STIEN的预测精度均最优.在5个数据集上各方法的PRR指标均为正值, 表明当去除DQE-STI-EN中的任意模块时, 其预测精度均会出现不同程度的降低, 这一结果验证DQE-STIEN中模块的有效性.
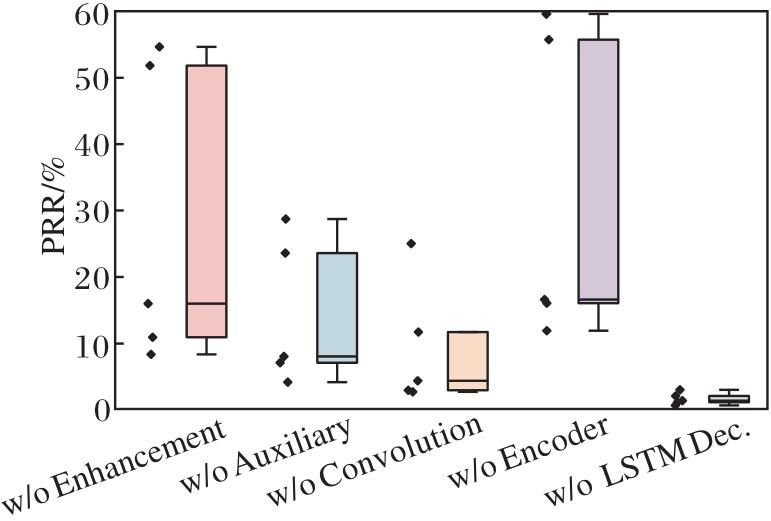 | 图7 各方法的PRR指标分布情况对比Fig.7 PRR distribution comparison of different methods |
从图7中可明显看出, w/o Encoder的预测精度降幅最大, PRR值范围为11.91%~59.59%, 这是由于双Transformer编码通道的设计使方法可进行并行编码, 充分提取船舶轨迹数据中的时空信息并转化为有用的信息表示, 对轨迹预测精度的提升有显著促进作用.其次是w/o Enhancement, 其PRR值范围为8.35%~54.65%, 这一差异主要归因于数据质量增强模块的缺失.数据质量增强模块通过提升输入数据的质量, 使方法能高效捕捉数据中的底层信息和动态特征, 因此, 在DQE-STIEN中对提升轨迹预测精度也起到关键作用.
此外, 当DQE-STIEN未添加运动信息编码器(w/o Auxiliary)或未进行时空关联提取(w/o Convolution)时, 各项指标均呈现出上升趋势, 二者的PRR值范围分别为4.17%~28.71%和2.71%~25.01%.这一结果表明, 运动信息编码器和时空关联提取模块对模型的预测精度具有一定的提升作用.使用LSTM替代GRU进行预测解码(w/ LSTM Dec.)对DQE-STIEN的影响最小, 对应的PRR值范围为0.67%~3.03%, 但仍造成DQE-STIEN预测性能的降低.
为了进一步探究DQE-STIEN在不同历史步长和预测步长下的表现, 设置7组步长:
{30-5, 30-10, 30-30, 60-5, 60-10, 60-30, 60-60},
其中30-5表示使用30个历史步长预测5个未来步长的船舶轨迹. 对比方法选择性能较优的基于单一机器学习模型的船舶轨迹预测方法(文献[32]方法)和多种机器学习模型混合的船舶轨迹预测方法(CNN-GRU), 具体指标值如表9所示, 表中黑体数字表示最优值.
| 表9 步长不同时各方法的指标值对比 Table 9 Metric value comparison of different methods with different step lengths |
由表9可看出, 当设定相同的历史步长时, 随着预测步长的增加, 所有方法的预测性能都在不同程度上出现下降.例如:历史步长为30时, 将预测步长从5延至30, CNN-GRU的MDE指标由0.868 7 km升至14.580 4 km, 上升约15.78倍, DQE-STIEN的MDE指标从0.538 2 km增至7.274 1 km, 误差扩大约13.52倍.同样的趋势也出现在历史步长为60的情况下.
在相同预测步长的情况下, 随着历史步长的增长, 所有方法的MDE指标均有所下降.例如:在预测步长为5时, 当历史步长由30增至60, 文献[32]方法、CNN-GRU和DQE-STIEN的MDE指标分别下降约23.93%、14.45%和2.32%.当预测步长为10和30时, 增加了历史步长, 文献[32]方法、CNN-GRU以及DQE-STIEN的MDE指标均出现同步降低的现象.这表明增加历史步长能帮助方法更好地理解移动目标的行为模式, 并有效利用更丰富的历史信息进行学习和迭代更新, 从而优化预测结果, 提高其对未来轨迹预测的精度.
此外, 将预测步长设置为30及以上时, 所有方法的精度都出现不同程度的下降, 且MDE指标均超过3 km, 但相比对比方法, DQE-STIEN的预测表现仍相对较优.
综合来看:DQE-STIEN在5 min及10 min的未来轨迹预测任务上预测性能出色; 在更具挑战性的30 min及60 min的未来轨迹预测情境下, DQE-STIEN的平均预测距离误差仍大幅低于对比方法.上述结果表明本文方法在复杂预测问题上的稳定性和适应能力.
DQE-STIEN中的参数设置对方法性能具有显著影响.本节分析双编码通道中Transformer网络层数、解码模块中GRU隐藏层维度、训练时学习率对预测精度的影响.网络层数决定特征提取的深度与复杂性, 隐藏层维度影响解码过程中的时间依赖关系捕捉能力及潜在特征的表达能力, 学习率控制参数更新步长, 直接影响训练效果和收敛速度.
在进行灵敏度测试时, 其它参数保持固定值, 并在每个配置下对5个船舶轨迹数据集进行5次重复实验, 取均值以减少随机误差.具体测试结果如图8所示.
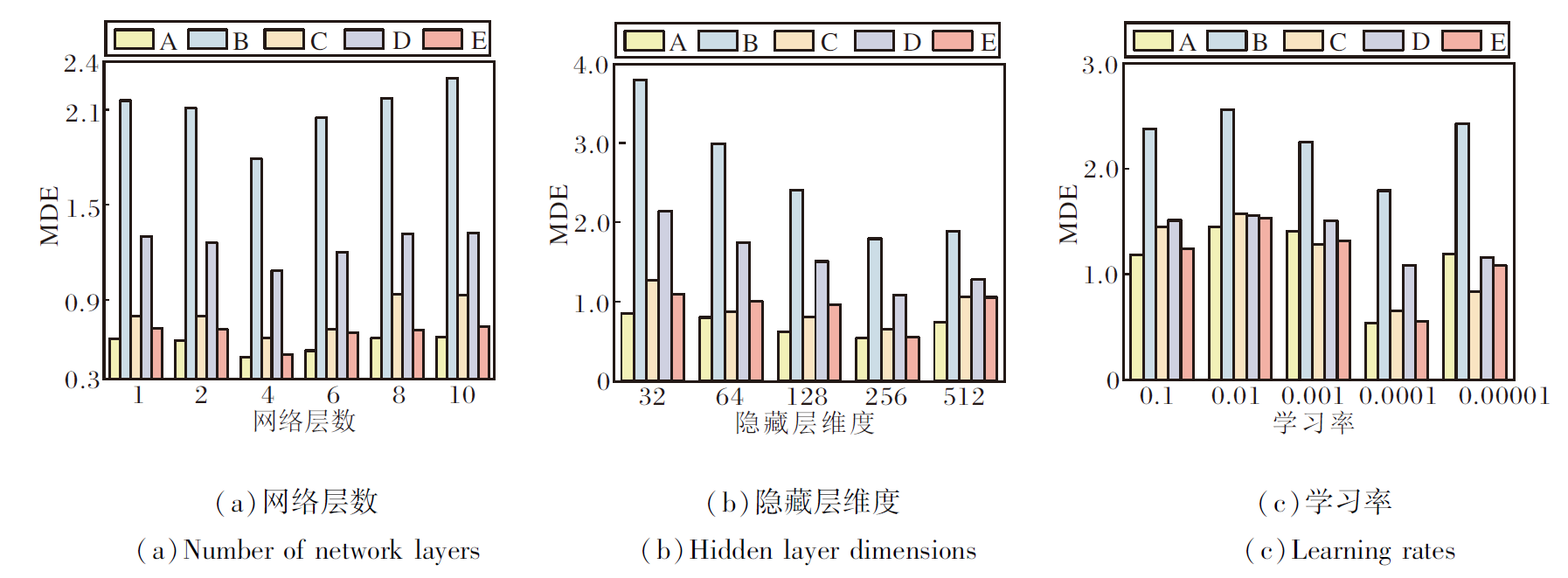 | 图8 参数灵敏度测试结果Fig.8 Parameter sensitivity test results |
由图8可见, 网络层数、隐藏层维度及学习率在不同数据集上表现出不同的敏感性, 但相同参数在所有数据集上的变化趋势一致.网络层数和隐藏层维度的增加使MDE指标先下降后上升, 而学习率的降低导致MDE指标呈现先上升、后下降、再上升的趋势.综合考虑参数影响, 最终确定在5个数据集上的最优配置如下:网络层数为4, 隐藏层维度为256, 学习率为0.000 1.
上述实验验证DQE-STIEN在船舶轨迹数据预测精度上的优势, 同时明确DQE-STIEN中各模块的有效性.
为了观察DQE-STIEN在其它领域时序数据上的表现情况, 基于对比实验结果和稳健性分析的设置, 选取文献[32]方法和CNN-GRU同步进行实验, 并与DQE-STIEN的预测结果进行对比, 以此评估DQE-STIEN的泛化性.具体指标值如表10所示, 表中黑体数字表示最优值.
| 表10 各方法在其它领域数据集上的指标值对比 Table 10 Metric value comparison of different methods on other domain datasets |
由表10可看出, DQE-STIEN在数据集O2、O3、O4上的表现均优于文献[32]方法和CNN-GRU, 但在数据集O1上表现不佳, 各项指标均低于文献[32]方法和CNN-GRU.CNN-GRU在4个数据集上的表现均优于文献[32]方法.
数据集O1数据体量较小, 属于短序列数据, 模式简单, 上述实验结果表明简单模型在短序列数据上效率更高, 更容易捕捉数据的基本模式, 不易陷入过拟合, 而复杂模型在短序列上试图捕捉更多的细节, 在数据量有限时这些细节可能属于噪声, 从而导致模型出现过拟合情况.数据集O2、O3、O4数据量相对较大, 属于长序列, 数据模式较复杂, 数据中蕴含较多的时空关联信息, DQE-STIEN的架构设计使其能更好地在这类复杂数据上捕捉数据中的长期依赖关系和复杂模式, 实现相对较优的预测效果.
DQE-STIEN的泛化性评估实验结果表明, DQE-STIEN在船舶轨迹以外的多个领域长序列数据集上均表现良好, 各项指标均优于对比方法, 由此体现DQE-STIEN在不同领域具有一定的泛化能力.
本文基于船舶海上轨迹数据的非线性、非平稳性及不确定性, 提出融合数据质量增强和时空信息编码网络的船舶海上轨迹预测方法(DQE-STIEN).针对低质量的船舶轨迹数据, 设计基于哈希映射分类及局部离群哈希值异常检测的数据质量增强算法(HMC-LODH), 实现数据质量的有效增强, 同时构建具有双Transformer编码通道的时空信息编码网络(STIEN), 独立关注两种不同类型的信息特征, 并综合考虑两种信息之间存在的交互关系, 在实例中明显提升轨迹预测的准确性.在基于NOAA公开数据库提取的5个船舶轨迹数据集上的大量实验验证DQE-STIEN在预测精度上的优越性和稳定性.此外, DQE-STIEN在不同领域的长序列数据集上均表现良好, 能有效捕捉数据的长期依赖关系和复杂模式, 具有较优的泛化性.今后可考虑在现有方法基础上纳入自监督学习机制, 以应对船舶遇险场景下的数据稀疏问题, 通过预训练任务增强数据质量和模型的表示能力, 提升方法在稀疏数据上的鲁棒性.
本文责任编委 高 阳
Recommended by Associate Editor GAO Yang
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
|
| [37] |
|
| [38] |
|
| [39] |
|
| [40] |
|
| [41] |
|